3D离群点滤波
算子功能
去除输入点云中的离群点
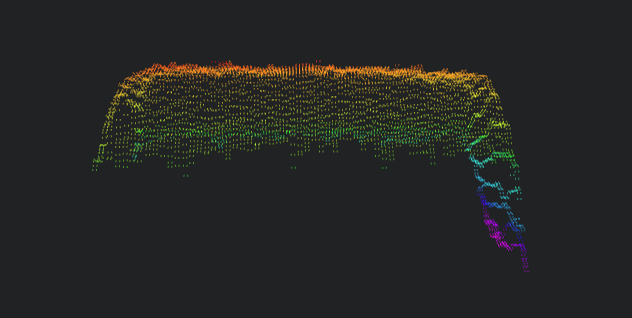
输入点云
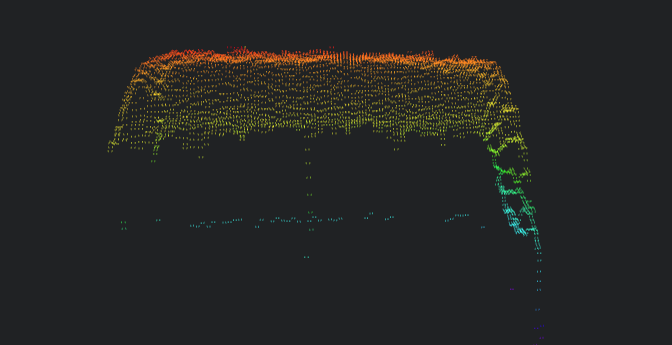
输出结果
参数介绍
输入参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输入图像 | 0-8 | 0 | 图像输入的IM编号 | |
计算参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 算法 | 基于邻域的离群点去除/半径离群点去除 | 基于邻域的离群点去除 | 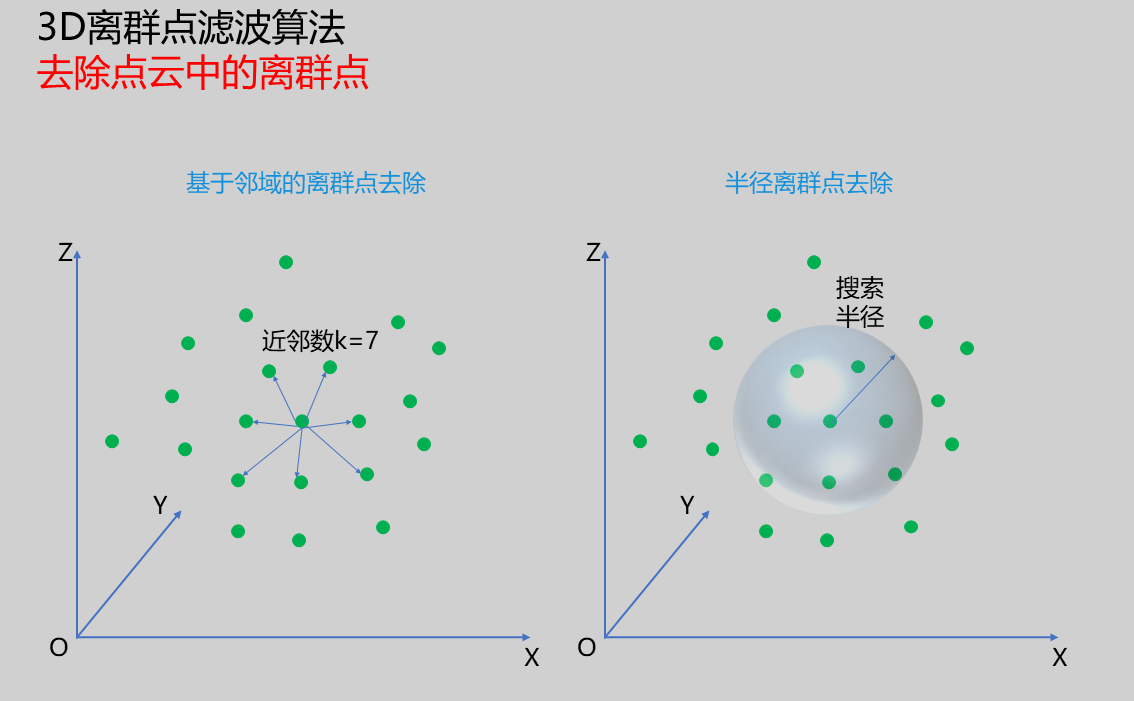 | |
| 基于邻域的离群点去除 | 参见基于邻域的离群点去除 | |||
| 半径离群点去除 | 参见半径离群点去除 | |||
| 输出图像 | 图像输出的IM编号 |
基于邻域的离群点去除
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| k近邻数 | 10 | 需要搜索的相邻点数量。 当值较大(如 50-100)时,有利于整体范围外的离群点去除。当值较小时,有利于局部离群点的去除。 注意: k值越大,算子消耗的时间也会增加,需在滤波效果和运行时间之间权衡。 | 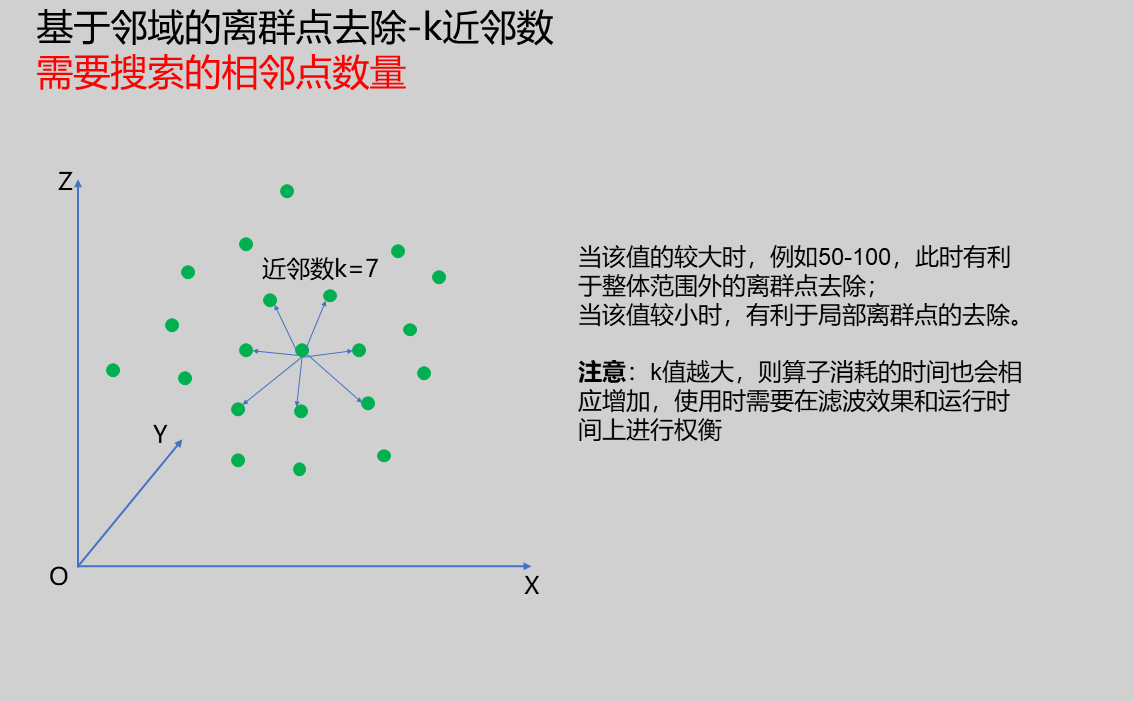 | |
| 标准差乘积 | 2.000 | 用于计算去除离群点的阈值系数。 值越小,计算出的距离阈值越小,去除的离群点数量越多。 推荐调节范围: 1.0-2.0。注意: 小于1.0的数值请谨慎调节,可能剔除许多有效点。 | 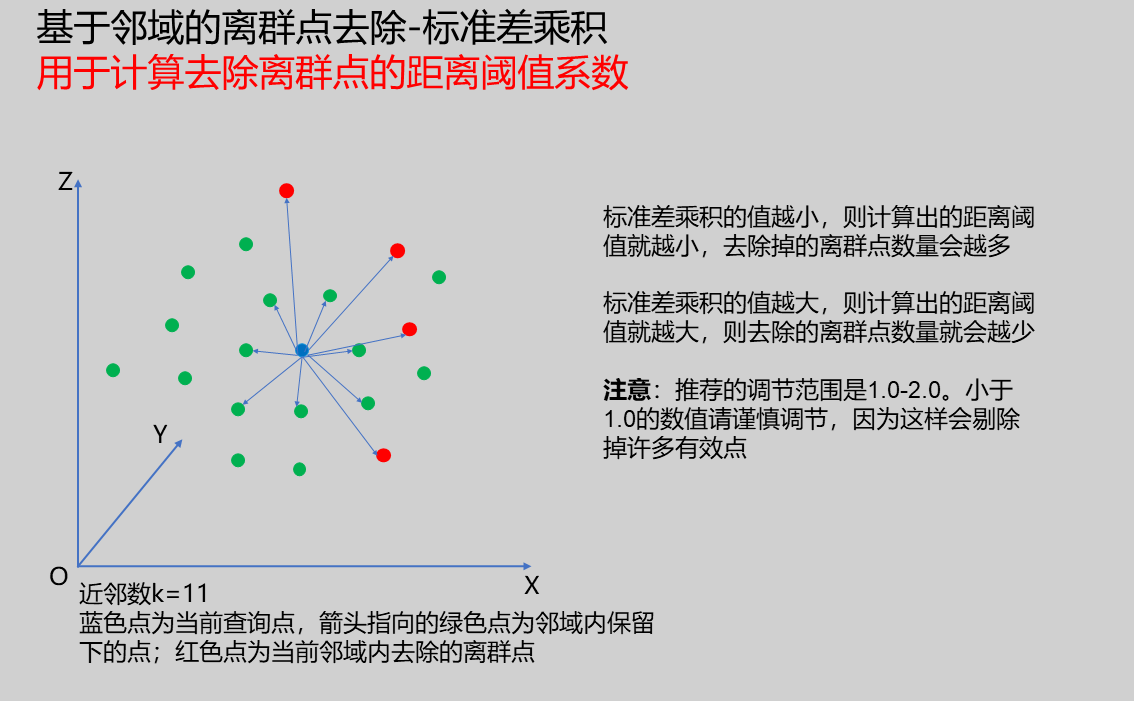 |
半径离群点去除
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 搜索半径 | 0.500 | 半径搜索时的球半径。 半径越大,半径范围内的点数量通常会增大。 因此,该参数需与半径范围内的最小点数结合调节。 注意:搜索半径值越大,算子消耗的时间也会相应增加。 | 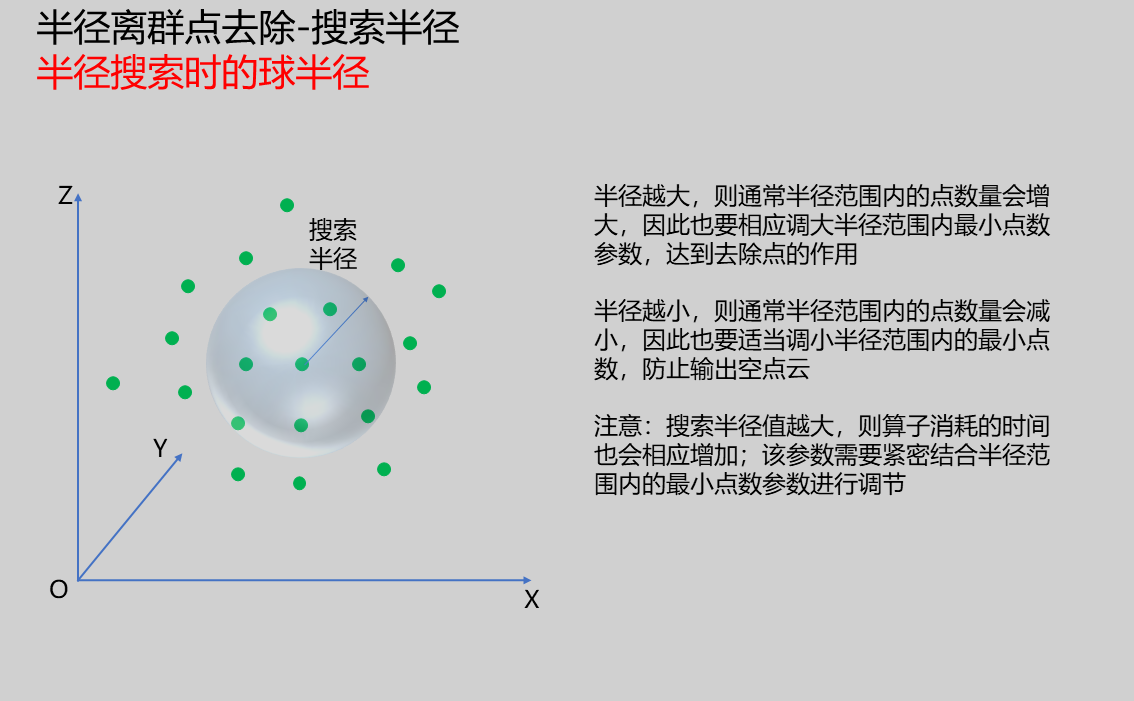 | |
| 半径范围内的最小点数 | 1 | 球半径范围内需要包含的最小点数,若小于设定阈值,当前查询点将被滤除。 注意:该点数阈值越大,算子消耗的时间也会相应增加。 | 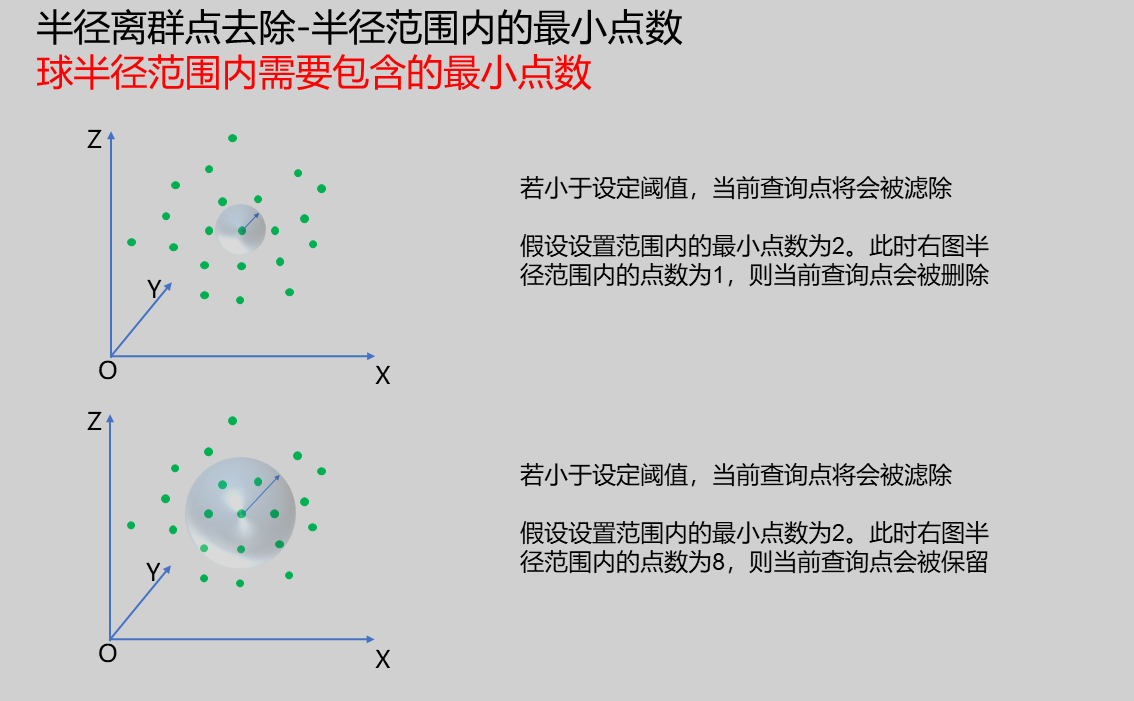 |
输出参数
| 名称 | 类型 | 范围 | 说明 |
|---|---|---|---|
| Result | bool | true/false | true为成功 false为失败 |
| Warning | bool | true/false | true表示有警告 false表示没有 |
| Message | string | 输出成功或错误或警告信息,如果没有错误或警告为空 | |
| Time | float | 算子执行时间,单位: ms |
异常排查
| 序号 | 模板 | 参数 | 解决方法 |
|---|---|---|---|
| 1 | 统计离群点滤波失败 | 1.检查输入点云是否为空 2.检查k值是否小于0或大于100 3.检查标准差系数是否小于0或大于1000 | |
| 2 | 半径滤波失败 | 1.检查输入点云是否为空 2.检查半径是否小于0 | |
| 3 | 所有点都被过滤了!请修改参数 | 1.检查输入点云是否为空 2.检查ROI位置是否框选到点云 3.检查点云中是否含有无效值 4.检查半径系数是否设置过小 | |
| 4 | 输入的值为{0},无效的离群点滤波算法 | 只支持Neighborhood-based outlier removal、Radius outlier removal |
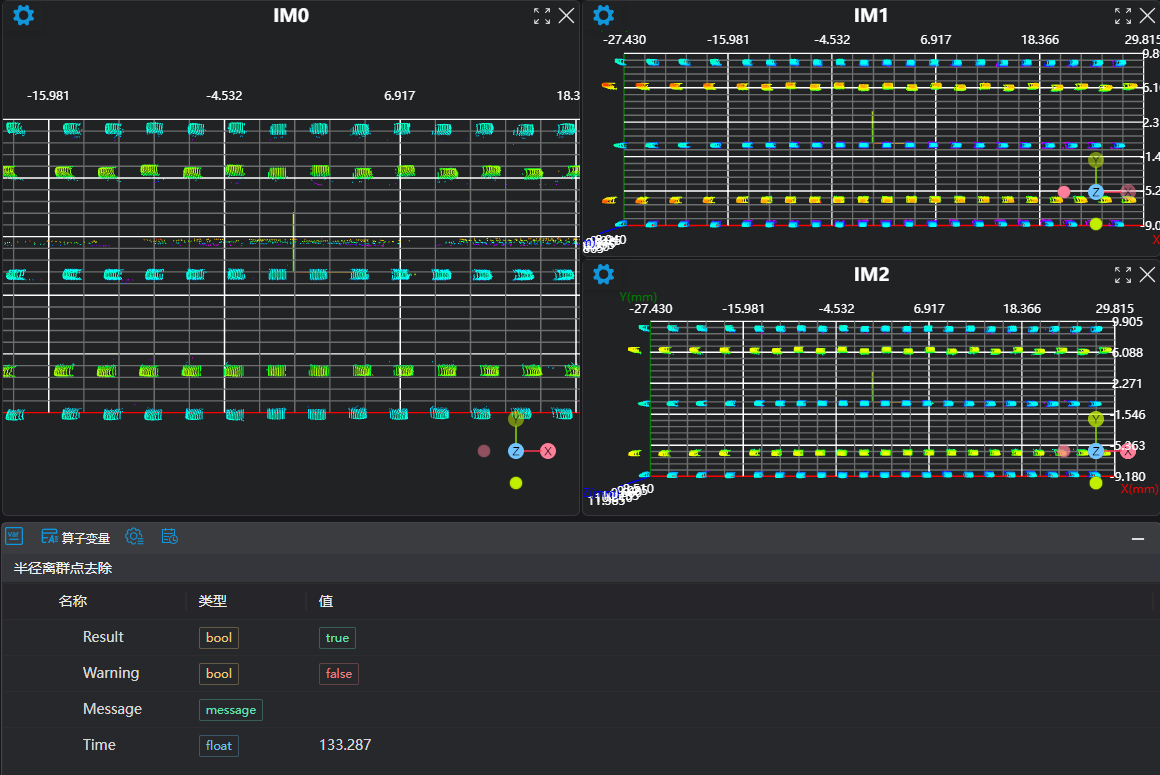
示例介绍
工程设计
选择
加载3D点云工具,加载需要处理的3d点云图到IM0。选择两个
3D离群点滤波工具,使用不同的算法对点云进行滤波。
工具使用
选择需要进行操作的输入图像,图像序号要与工程中图像所在IM序号一致
设置参数
点击
测试,查看图像窗口和参数是否符合预期没有问题后点击
保存,在运行列表中运行该算子,即可在对应的IM查看运行结果