3D坐标转换-眼在手上
算子功能
将输入相机坐标系下的位置和姿态信息进行转换,得到机械臂基底坐标系下的位置和姿态信息
参数介绍
输入参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输入图像 | 0-8 | 0 | 图像输入的IM编号 | |
计算参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 变换矩阵 | 相机坐标系到抓手坐标系的转换矩阵可以通过绑定选择已存在的矩阵 | 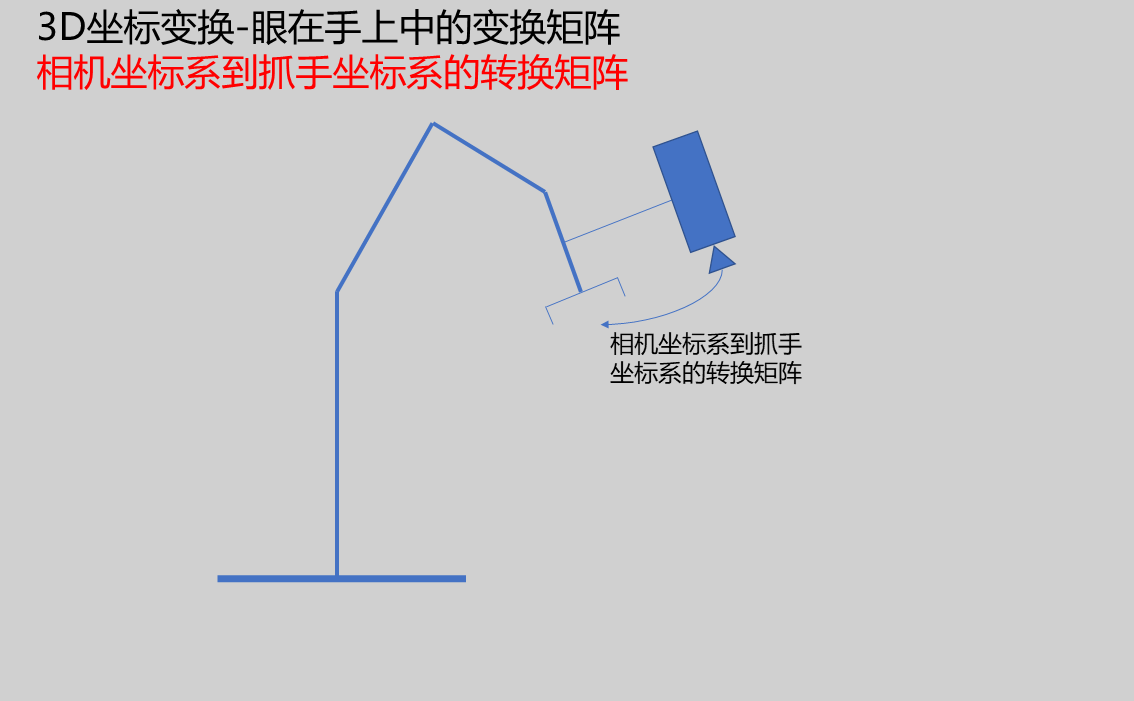 | ||
| TCP位姿 | pose | pose | 相机拍照取图时对应的工具中心原点位姿可以通过绑定选择已存在的位姿位置:TCP位置信息,单位: 毫米姿态:TCP方向信息 | |
| 输入类型 | 点面/圆 | 点面 | 设置需要变换的数据类型 点面:位置信息由点坐标提供,姿态信息由面的法向量提供 圆:位置信息由圆心坐标提供,姿态信息由方向向量提供 | |
输入点坐标可以通过绑定选择已存在的点 | ||||
| 平面 | 输入平面法向量可以通过绑定选择已存在的平面 | |||
| 圆 | 输入圆参数可以通过绑定选择已存在的圆 |
输出参数
| 名称 | 类型 | 范围 | 说明 |
|---|---|---|---|
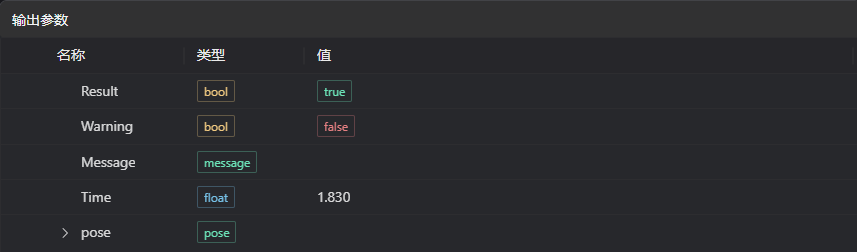
| Result | bool | true/false | true为成功 false为失败 |
| Warning | bool | true/false | true表示有警告 false表示没有 |
| Message | string | 输出成功或错误或警告信息,如果没有错误或警告为空 | |
| Time | float | 算子执行时间,单位: ms | |
| pose | pose | 变换后的位姿信息,位姿由位置和四元数组成 |
异常排查
| 序号 | 异常信息 | 对应参数 | 解决方法 |
|---|---|---|---|
| 1 | 标定矩阵的大小错误 | 检查标定矩阵是否为4x4大小 |
示例介绍
工程设计
- 选择
加载3D点云算子。 - 选择
3D孔算子,查找目标位置的位姿信息。 - 选择
3D坐标转换-眼在手上算子,对原始位置和方向进行转换,输出目标坐标系下的位姿。
工具使用
设置输入图像的IM序号。
设置参数。
点击
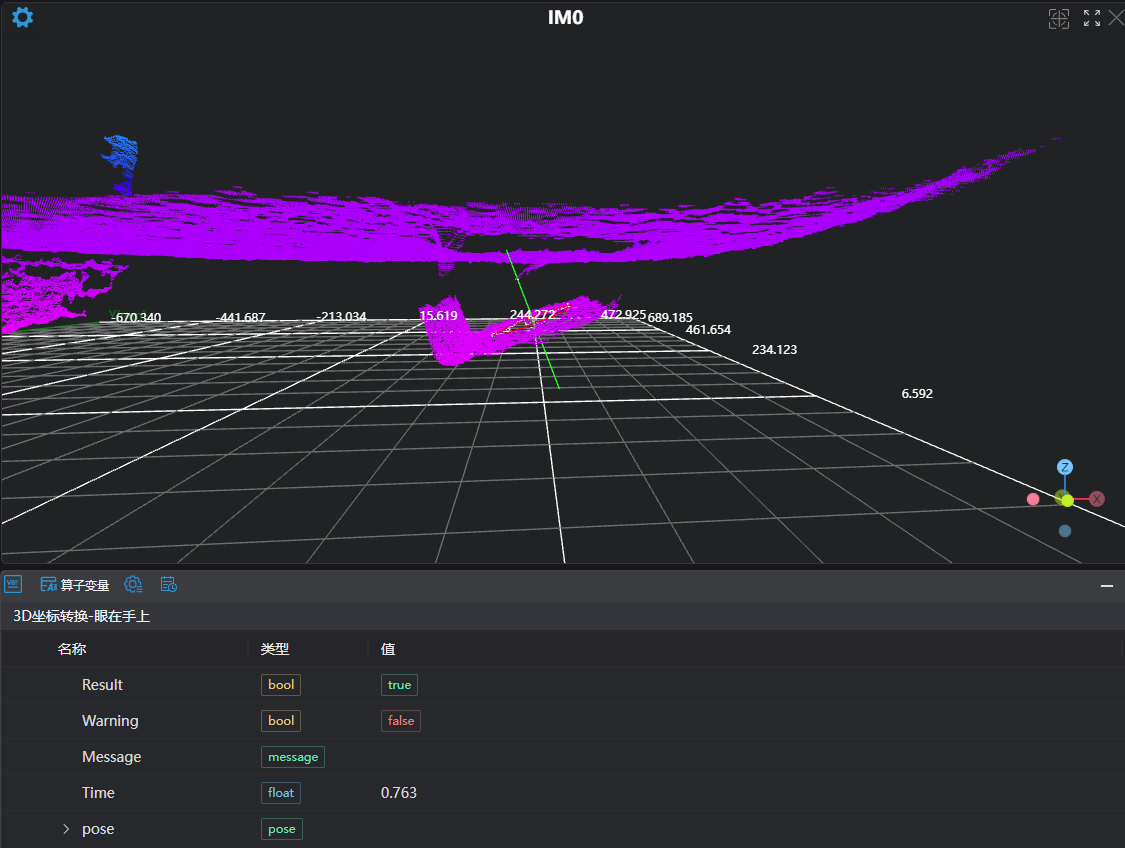
测试,查看结果。没有问题后点击
保存,在运行列表中运行该算子,即可查看运行结果。