BGA球共面度检测
项目简介
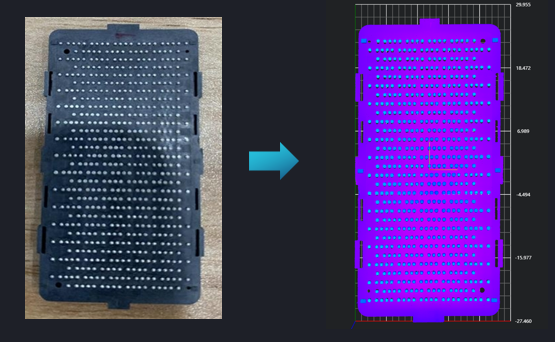
项目背景
焊锡球的共面度不良可能导致焊接不良、短路等问题,严重影响产品的性能和寿命,将测量得到的数据进行统计分析,包括最大值、最小值和均值等,以评估焊锡球的共面度是否满足产品要求。
相机选型
LMI激光线扫相机 Gocator2520
检测要求
测量精度 ≤ 0.03mm
测量重复性 ≤ 0.02mm
测量周期 ≤ 2s
解决方案
AI-Vision采用集成工具的方法,一个工具直接计算出整体小球的共面度,在大大提升速度的同时简化了工程逻辑。
设计思路
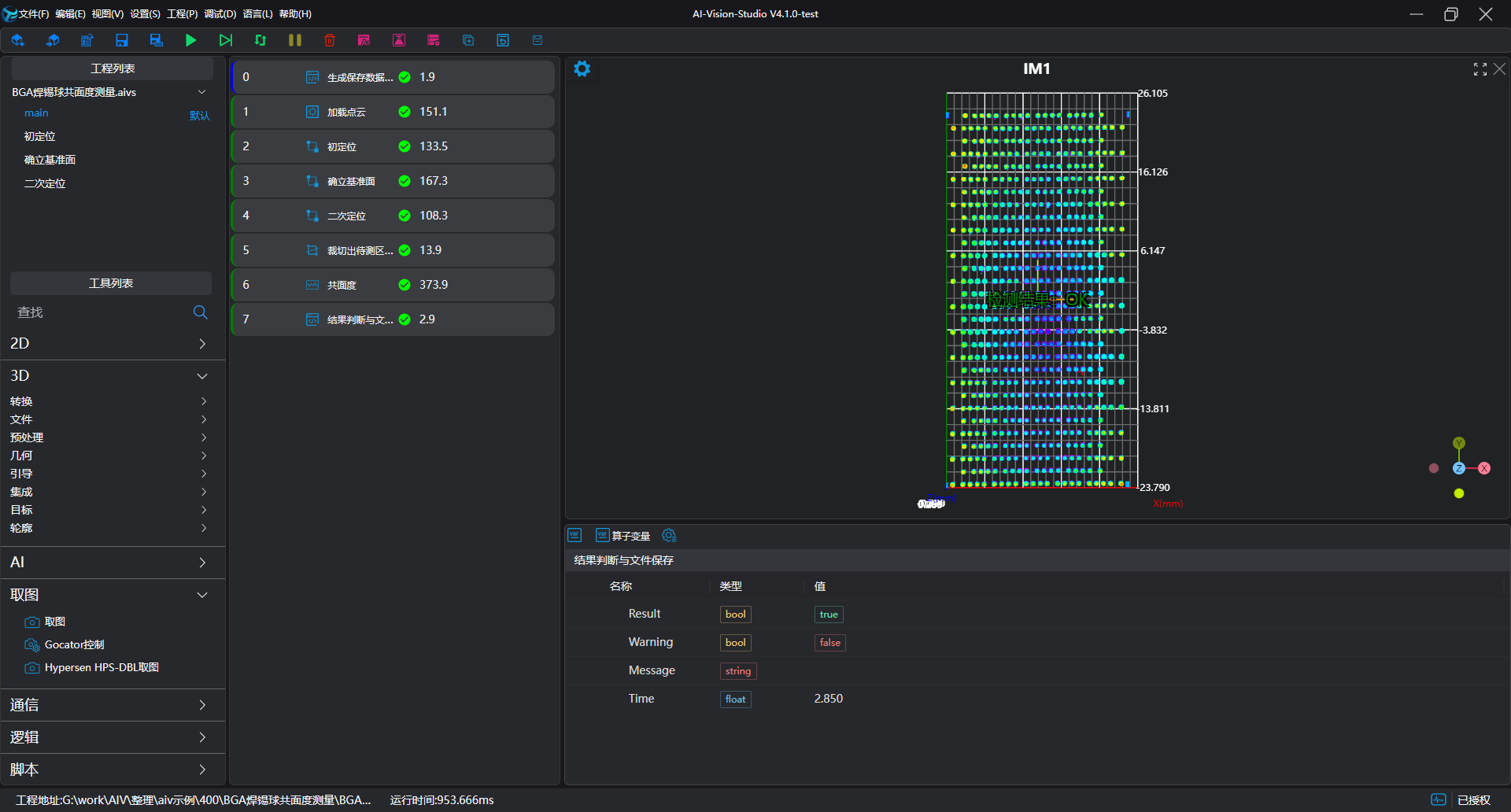
执行效果展示
工程结果展示:
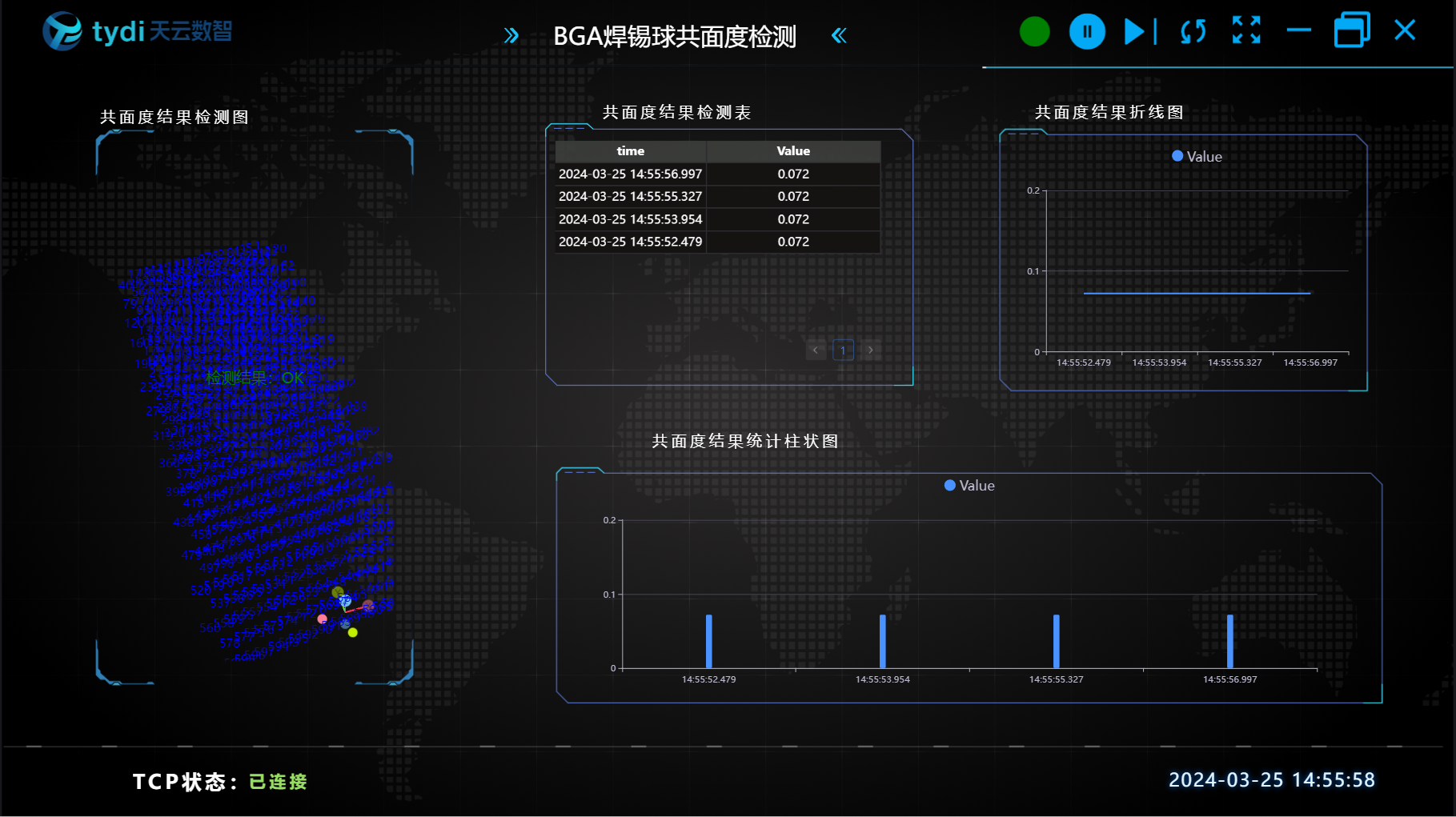
HMI结果展示:
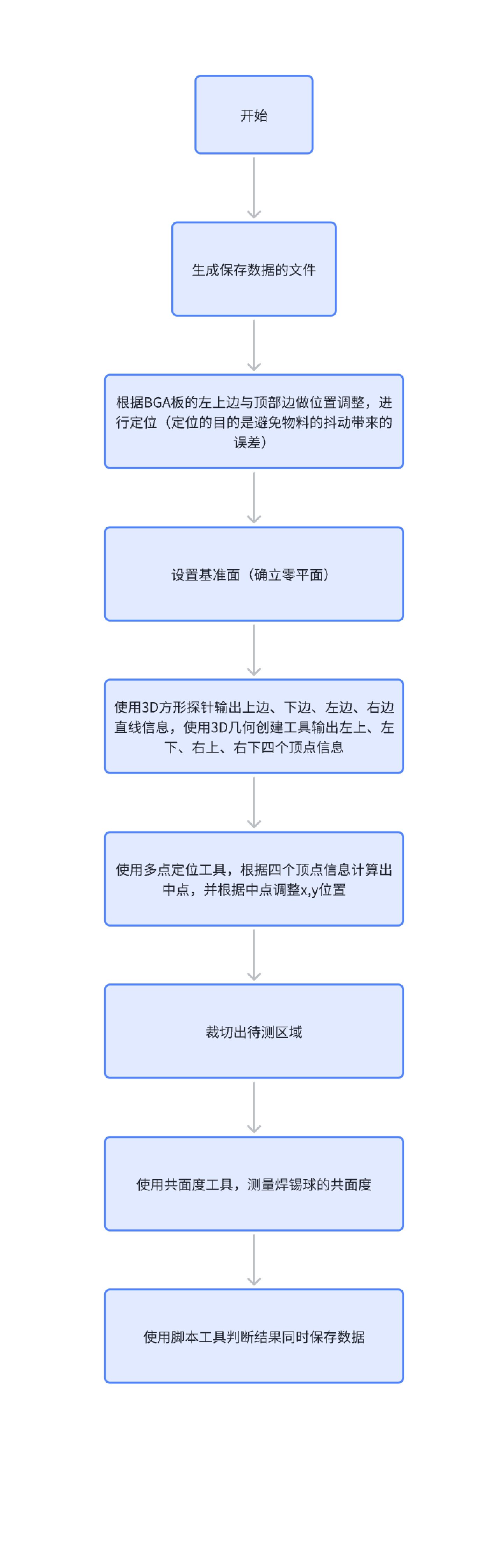
操作流程
一、初始化
- 选择
Lua脚本语言工具,创建待接收数据的csv文件。
- 拼接表头字符串,保存到csv文件
经验
.. 用于string类型字符串拼接
part1 = "Hello, "
part2 = "world!"
result = part1 .. part2
print(result) # 输出: Hello, world!
,作为分隔符,分割每个数据项
-- 生成用于拼接的字符串
write = ""
--判断该文件是否存在,若不存在生成该文件,若存在跳过生成
if FileExists("./BGA.csv") == false then
-- “,”表示下一列,“\n”表示换行
write = write .. "Time," .. "Degree of coexistence" .. "," .. "OK/NG" .. "\n"
end
-- 拼接入当前时间
write = write .. os.date("%Y_%m_%d %H:%M:%S") .. ","
-- 字符串写入csv文件中
-- 当无该文件时,系统会自动生成该文件,同时该工具会WARN提示系统内无该文件
PrintToFile("./BGA.csv" , write)- 选择
加载点云工具,获取点云。
二、预处理

位置调整
在实际项目运行过程中,工件摆放位置可能有偏差,因此可以通过查找单个点或线来调整点云3D位置,确保不同图像原点在同一位置。
使用
3D方形探针工具,得到工件的左侧与上侧两条边。使用
3D几何交点工具,绑定上一步算子变量输出的两条边作为输入几何,输出两直线交点。使用
3D位置调整工具,绑定上一步算子输出输出的直线交点作为新原点调整点云XY方向位置。
平面拟合
在实际项目运行过程中,工件摆放z轴方向也就是上下位置可能会有偏差,需要确立z轴零平面作为基准面,确保点云同一平面高度(z值)相同。
选择
3D区域工具,选取pcb板上面6块突出的柱子为拟合平面的区域。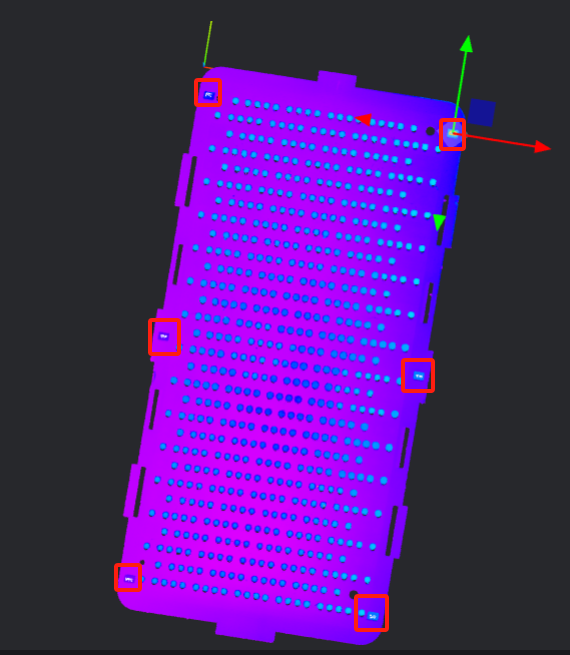
选择
3D平面工具,绑定上一步获取的区域作为输入区域来拟合平面,并将拟合出来的平面作为零平面。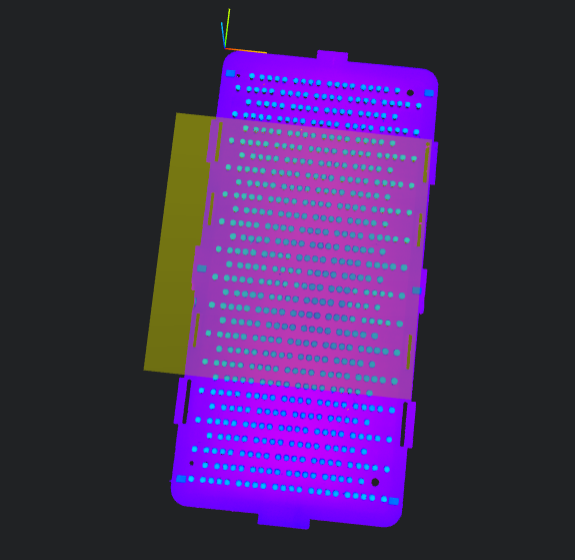
二次定位
对于该案例,客户要求的xy原点位置在点云中心位置,因此需要进行二次定位来调整基准位置。
- 选择
3D方形探针工具,在四条边上选取区域box,执行工具找到上下左右4条边。
选择
3D几何交点工具,分别绑定上一步找到的四条边中的两条边作为输入,获取左上左下右上右下四个顶点。选择
多点定位工具工具,绑定上一步获取的四个顶点位置参数作为输入点,执行工具输出上下左右四个顶点的中心点,同时调整点云位置xy到中心点。
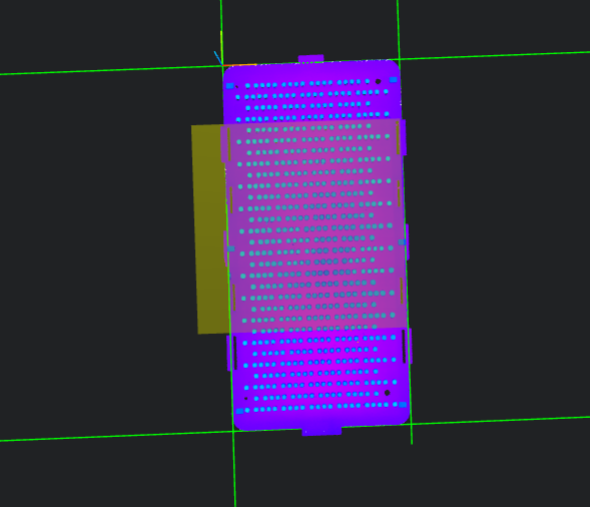
裁切出待测区域
该工程针对焊锡球共面度,为了便于直接对焊锡球进行后续测量,可以裁切出焊锡球区域。
选择
3D裁切工具,设置区域box只包含焊锡球点云区域,输出得到只包含焊锡球区域点云到IM1,便于后续处理。
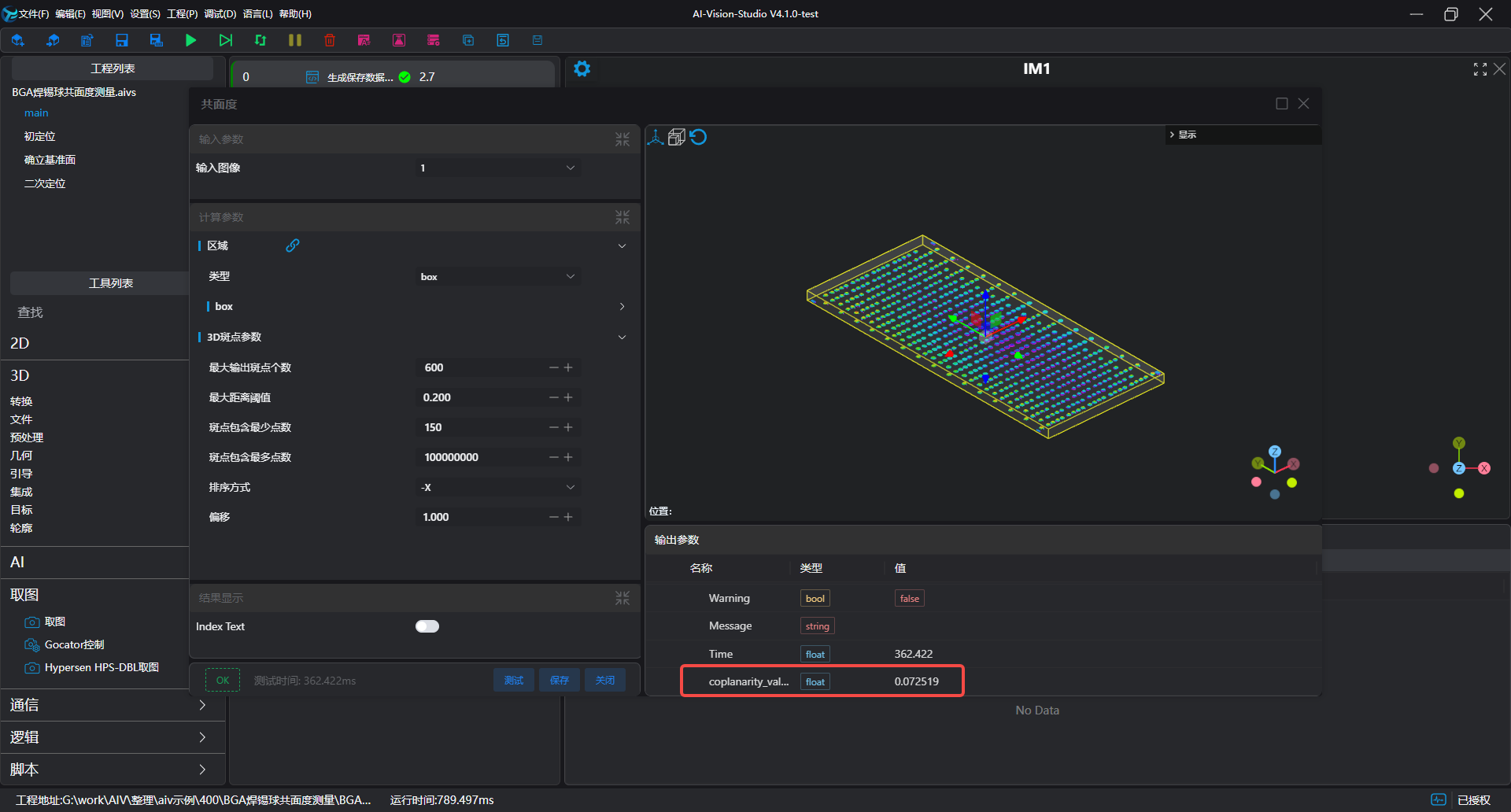
三、共面度测量
选择共面度工具,框选出进行测量的区域,进行共面度检测。
四、数据判断及保存
选择lua语言脚本工具,将测量的结果进行判断且显示在图像上,并将判断结果和数据保存在文件中。
绑定
共面度工具输出变量平面度值根据平面度值进行结果判断并显示数据
- 保存判断结果到csv文件。
经验
string.format 用于格式化字符串 %.nf表示将浮点数格式化为保留 n 位小数。
pi = 3.14159 str = string.format("Pi is approximately %.3f", pi) print(str) -- 输出: Pi is approximately 3.141
-- 设置全局变量
SetFloatVariable('Value',math.floor(1000*Result)/1000)
-- 进行结果判断
if Result<0.065 or Result>0.075 then
-- 数据显示
DrawText3D(0,"red",0,0,5,20,"检测结果:" .. "NG")
write = string.format("%.3f," , Result) .. "NG" .. "\n"
else
DrawText3D(0,"green",0,0,5,20,"检测结果:" .. "OK")
write = string.format("%.3f," , Result) .. "OK" .. "\n"
end
-- 将字符串写入文件中
PrintToFile("./BGA.csv" , write)