3D共面度
算子功能
对输入的点云图,例如BGA焊锡球,进行共面度测量。输出的共面度为所有点高度的标准差。
参数介绍
输入参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输入图像 | 0-8 | 0 | 图像输入的IM编号 | |
计算参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 区域 | 可以手动选择需要计算共面度的区域可以通过绑定选择已存在的ROI区域 | |||
| 3D斑点参数 | 参见3D斑点参数 | |||
| 输出图像 | 0-8 | 0 | 图像输出的IM编号 |
3D斑点参数
在进行共面度计算之前会进行3D斑点的提取,这些参数有助于进行斑点的正确获取。
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 最大输出斑点个数 | 1 | 至多可以输出的斑点数量 | ||
| 最大距离阈值 | 0.500 | 区分两个不同斑点间的距离阈值。若相邻斑点间的距离较小,尝试调小该值。 | 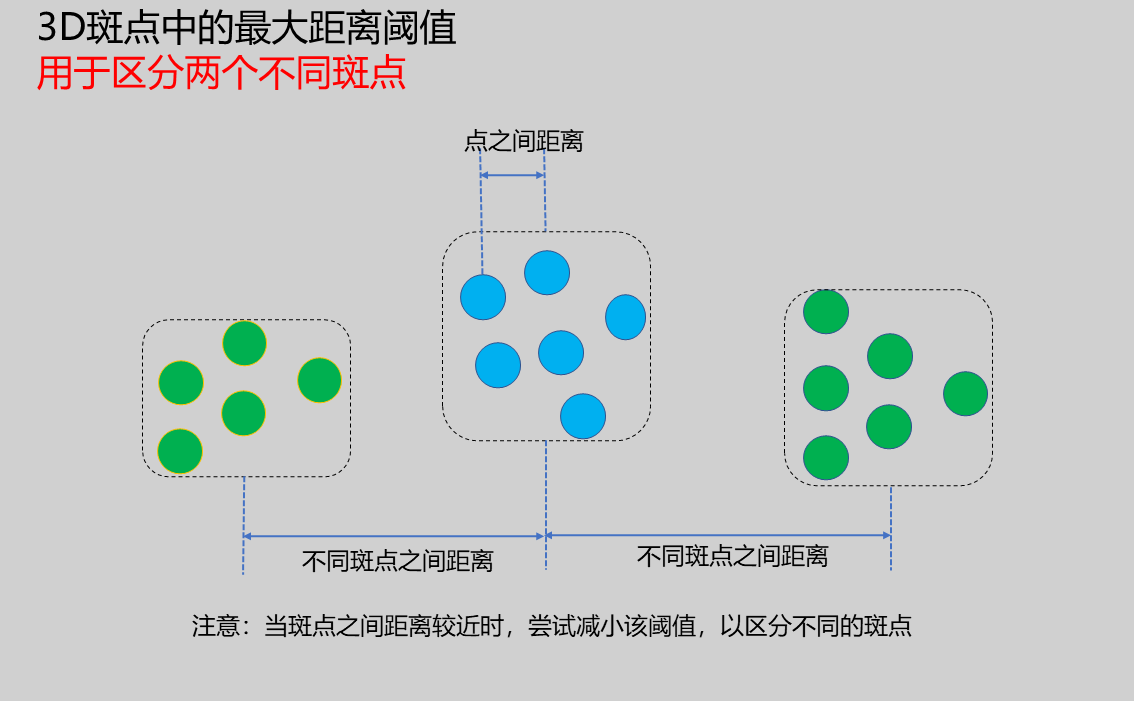 | |
| 斑点包含最少点数 | 1 | 每一个斑点中需要包含的最少点数,可以对斑点进行过滤。 | ||
| 斑点包含最多点数 | 100000000 | 每一个斑点中需要包含的最多点数,可以对斑点进行过滤。 | ||
| 排序方式 | +X/-X/+Y/-Y/+Z/-Z | -X | 将找到的斑点按照指定的规则进行排序:- 不排序:随机输出 - 点数:根据每一个斑点中包含的点数对斑点进行排序 - X:根据每一个斑点的质心X坐标,对斑点进行排序 - Y:根据每一个斑点的质心Y坐标,对斑点进行排序 - Z:根据每一个斑点的质心Z坐标,对斑点进行排序 | 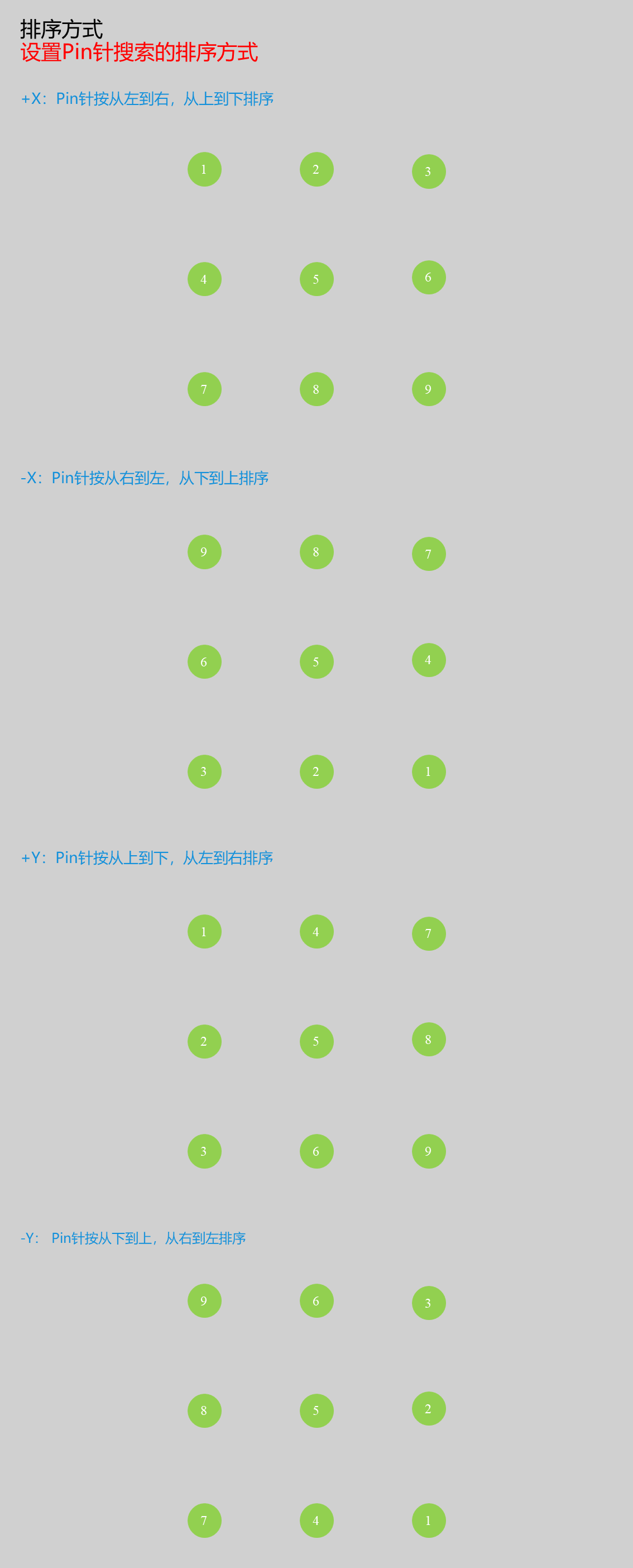 |
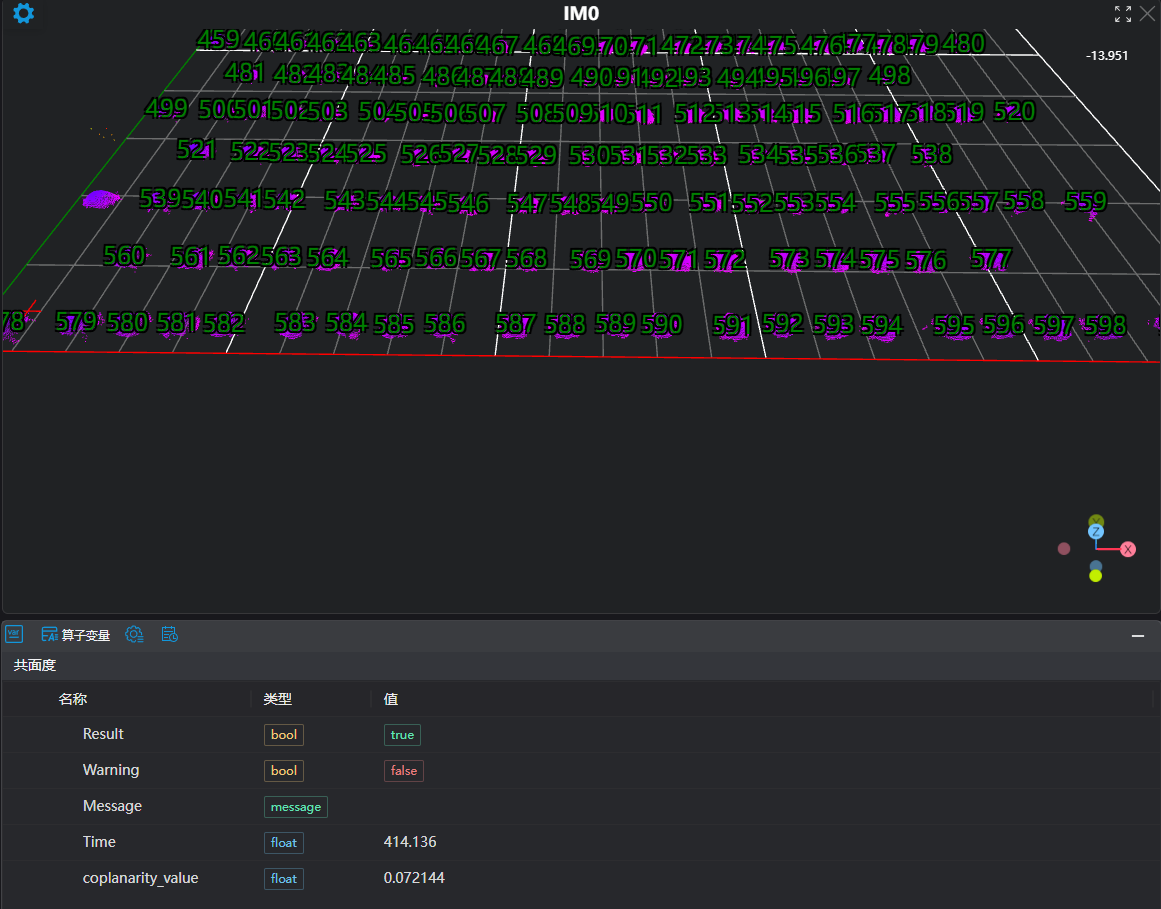
结果显示
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 序号 | true/false | false | 斑点序号,若启用,则在图像中显示 | |
| ROI点集 | true/false | false | ROI框选的区域点集,若启用,则在图像中显示 |
输出参数
| 名称 | 类型 | 范围 | 说明 |
|---|---|---|---|
| Result | bool | true/false | true为成功 false为失败 |
| Warning | bool | true/false | true表示有警告 false表示没有 |
| Message | string | 输出成功或错误或警告信息,如果没有错误或警告为空 | |
| Time | float | 算子执行时间,单位:ms | |
| coplanarity_value | float | 共面度值 |
异常排查
| 序号 | 异常信息 | 对应参数 | 解决方法 |
|---|---|---|---|
| 1 | 输入的值是{0},无效的区域类型 | 区域类型 | 只支持window2d、box、pointset |
| 2 | 区域为空 | 1.检查输入点是否为空 2.检查ROI区域是否框选到点云 3.检查绑定的pointset是否为空 | |
| 3 | 输入的值为{0},无效的排序方式 | 排序方式 | 只支持+X、-X、+Y、-Y |
| 4 | 斑点查找失败 | 检查斑点参数中的距离阈值是否设置过小 |
示例介绍
工程设计
选择
加载3D点云工具,加载需要处理的3d点云图到IM0。选择
3D共面度工具。
工具使用
选择需要进行操作的输入图像,图像序号要与工程中图像所在IM序号一致
选择区域类型为盒子,将盒子移动到待测位置,包围住待测点云
使用技巧
1. 通过图像窗口上的ROI控制器来拖动或缩放盒子;
2. 直接在计算参数中修改盒子的起点或终点坐标来调整盒子位置和大小;
设置参数
在结果显示栏中勾选想要显示的内容
点击
测试,查看图像窗口和参数是否符合预期没有问题后点击
保存,在运行列表中运行该算子,即可在对应的IM查看运行结果