点云转深度图
算子功能
将输入的3D点云图转换成2D深度图。将每个点的z值映射为2D深度图中的灰度值。
参数介绍
输入参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输入图像 | 0-8 | 0 | 图像输入的IM编号 | |
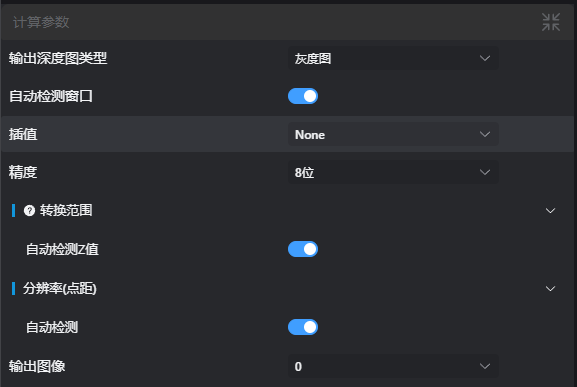
计算参数
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输出深度图类型 | 灰度图/浮点图 | 灰度图 | 灰度图:每个像素对应的值为高度归一化后的灰度值 浮点图:每个像素对应的值为实际高度值 | |
| 自动检测窗口 | true/false | true | 若选中,则自动计算需要转换的点云范围,此范围为点云图外接包围盒的范围;若取消选中,则会出现区域选项用于手动设置待转换区域。 | |
| 区域 | 仅在自动检测窗口取消选中时生效,此时需要手动设定转换区域。 | |||
| 插值 | None | None | 暂未提供插值方法 | |
| 精度 | 8位/16位 | 8位 | 可选择8位或16。8位的灰度值范围为[0, 255],16位的灰度值范围为[0, 65535]。 | |
| 自动检测Z值范围 | true/false | true | 若选中,则自动将当前转换区域中的最大高度值与黑色像素相对应,最小高度值与白色像素相对应。 | |
| 黑色像素对应的高度值 | 0.000 | 当自动检测Z值范围取消选中时,需要设置此项。 | ||
| 白色像素对应的高度值 | 0.000 | 当自动检测Z值范围取消选中时,需要设置此项。 | ||
| 自动检测 | true/false | true | 开启后,输入点云要求为有序点云,将根据有序点云的行数和列数,计算点云的X分辨率和Y分辨率。 | |
| X分辨率 | 0.100 | 设置转换后的深度图中单个像素的宽度。设置点距需要尽量与深度图相机z轴方向精度相同,过小图像会出现许多条纹,过大图像会模糊。 注:需要在 自动检测关闭后,手动设置。 | ||
| Y分辨率 | 0.100 | 设置转换后的深度图中单个像素的高度。设置分辨率需要尽量与点云图相机取图时设置点距一致,过小图像会出现许多条纹,过大图像会模糊。 注:需要在 自动检测关闭后,手动设置。 | ||
| 输出图像 | 0-8 | 0 | 图像输出的IM编号 |
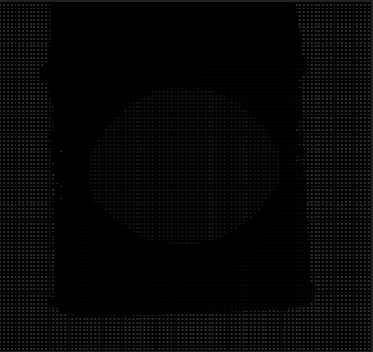
注意:手动模式下,分辨率设置过小时,会导致输出的深度图像出现黑色条纹,如下图。解决方法为调节分辨率至略微大于实际点距。
结果显示

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| ROI点集 | 仅在自动检测窗口取消选中时生效,ROI框选的区域点集,若启用,则在图像中显示 |
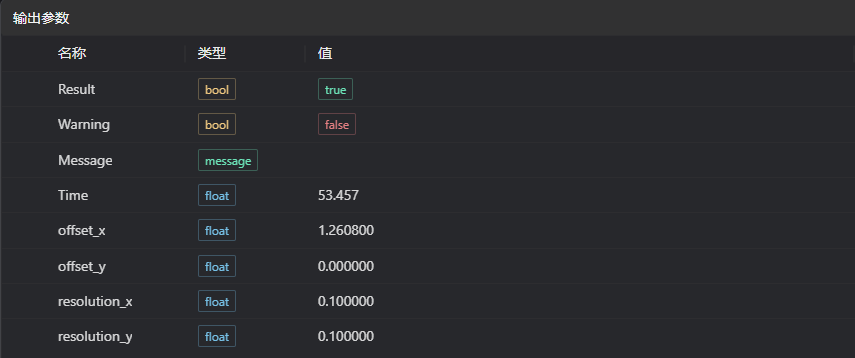
输出参数
| 名称 | 类型 | 范围 | 说明 |
|---|---|---|---|
| Result | bool | true/false | true为成功 false为失败 |
| Warning | bool | true/false | true表示有警告 false表示没有 |
| Message | string | 输出成功或错误或警告信息,如果没有错误或警告为空 | |
| Time | float | 算子执行时间,单位: ms | |
| offset_x | float | X轴偏移量 | |
| offset_y | float | Y轴偏移量 | |
| resolution_x | float | X轴分辨率 | |
| resolution_y | float | Y轴分辨率 |
高度值和深度值之间的映射关系
| 高度值 | 深度值 |
|---|---|
| 无效点(nan) | 0 |
黑色像素对应的高度值 | 2 |
白色像素对应的高度值 | n为位深度 |
大于黑色像素对应的高度值 | 1 |
小于白色像素对应的高度值 | n为位深度 |
异常排查
| 序号 | 异常信息 | 对应参数 | 解决方法 |
|---|---|---|---|
| 1 | 输入点云为空 | 检查输入点云是否为空 | |
| 2 | 自动检测分辨率模式下需要输入有序点云 | 自动检测分辨率模式下需要输入有序点云 | |
| 3 | 输入的值是{0},无效的输出深度图类型 | 输出深度图类型 | 只支持grayscale image、floating image |
| 4 | 点云转深度图失败 | 检查xy分辨率是否都大于0 |
示例介绍
工程设计
选择
加载点云工具,加载需要处理的3d点云图到IM0。选择
点云转深度图工具。
工具使用
选择需要进行操作的输入图像,图像序号要与工程中图像所在IM序号一致
选择自动检测窗口
设置参数
在结果显示栏中勾选想要显示的内容
点击
测试,查看图像窗口和参数是否符合预期没有问题后点击
保存,在运行列表中运行该算子,即可在对应的IM查看运行结果
