Skip to content
AI-Vision
Search
K
Main Navigation
v4.4.3
主页
软件介绍
工具介绍
设备配置
参考示例
简体中文
English
简体中文
English
Appearance
Menu
返回顶部
大纲
海康机器人 3D激光轮廓传感器
参数
类型
说明
依赖
序列号
枚举
指定相机的序列号
软件触发
布尔(开关)
设置是否需要软件触发取图
去除无效点
布尔(开关)
设置是否启用去除无效点功能,去除无效点后会输出无序点云
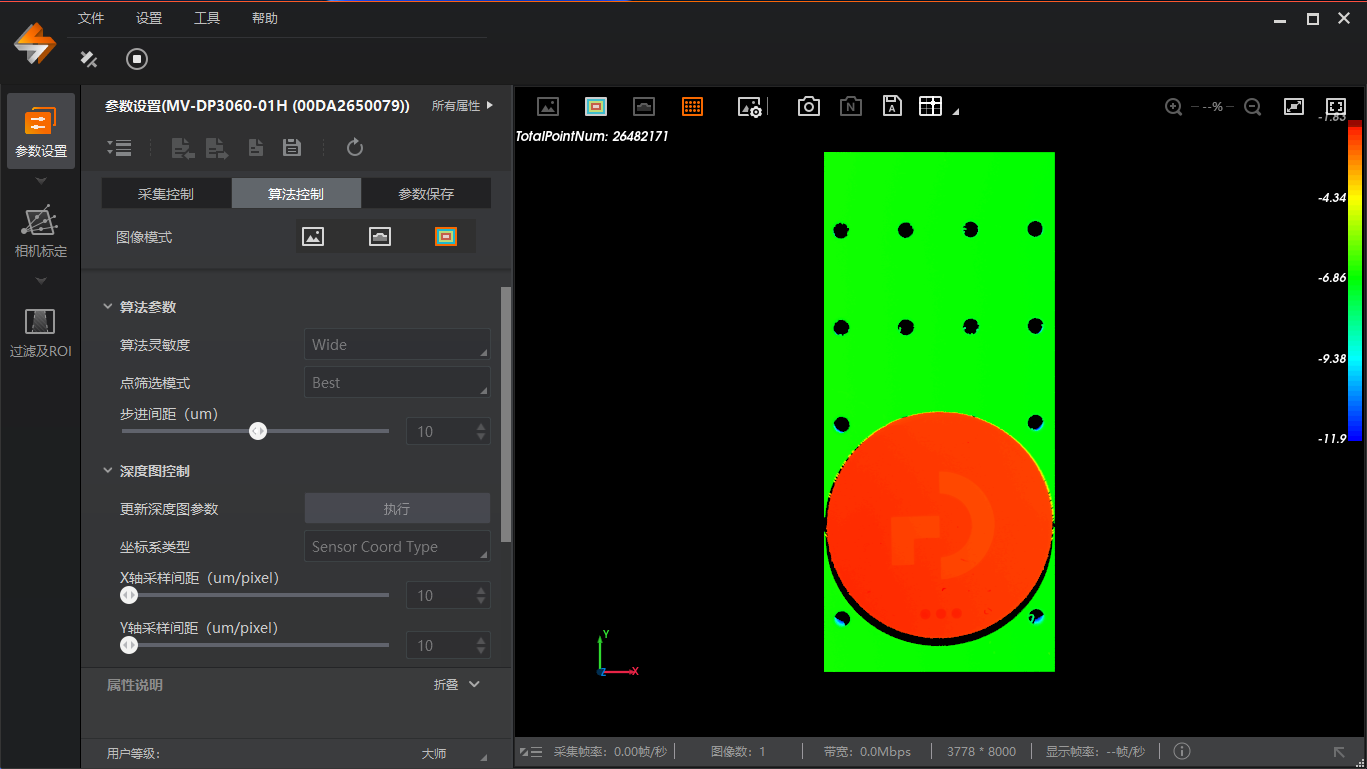
相机准备
保证相机控制器ip和网卡ip在同一网段。
能够使用相机官方软件取到图且达到想要的效果。
保存相机参数。
添加和连接设备
提示
连接前请先关闭官方取图软件,防止相互干扰。
取图测试