3D位置调整
算子功能
根据输入的位置信息,对点云进行平移或者旋转的操作来调整点云的位置。
参数介绍
输入参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输入图像 | 0-8 | 0 | 图像输入的IM编号 | |
计算参数
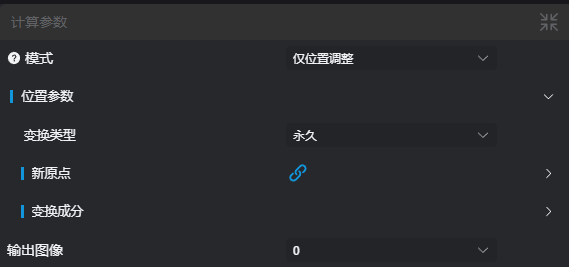
仅调整位置参数
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 模式 | 仅调整位置:根据输入的新原点信息,对输入点云进行坐标变换 方位调整:根据输入的 新方向信息,对点云的方向和位置进行调整 | 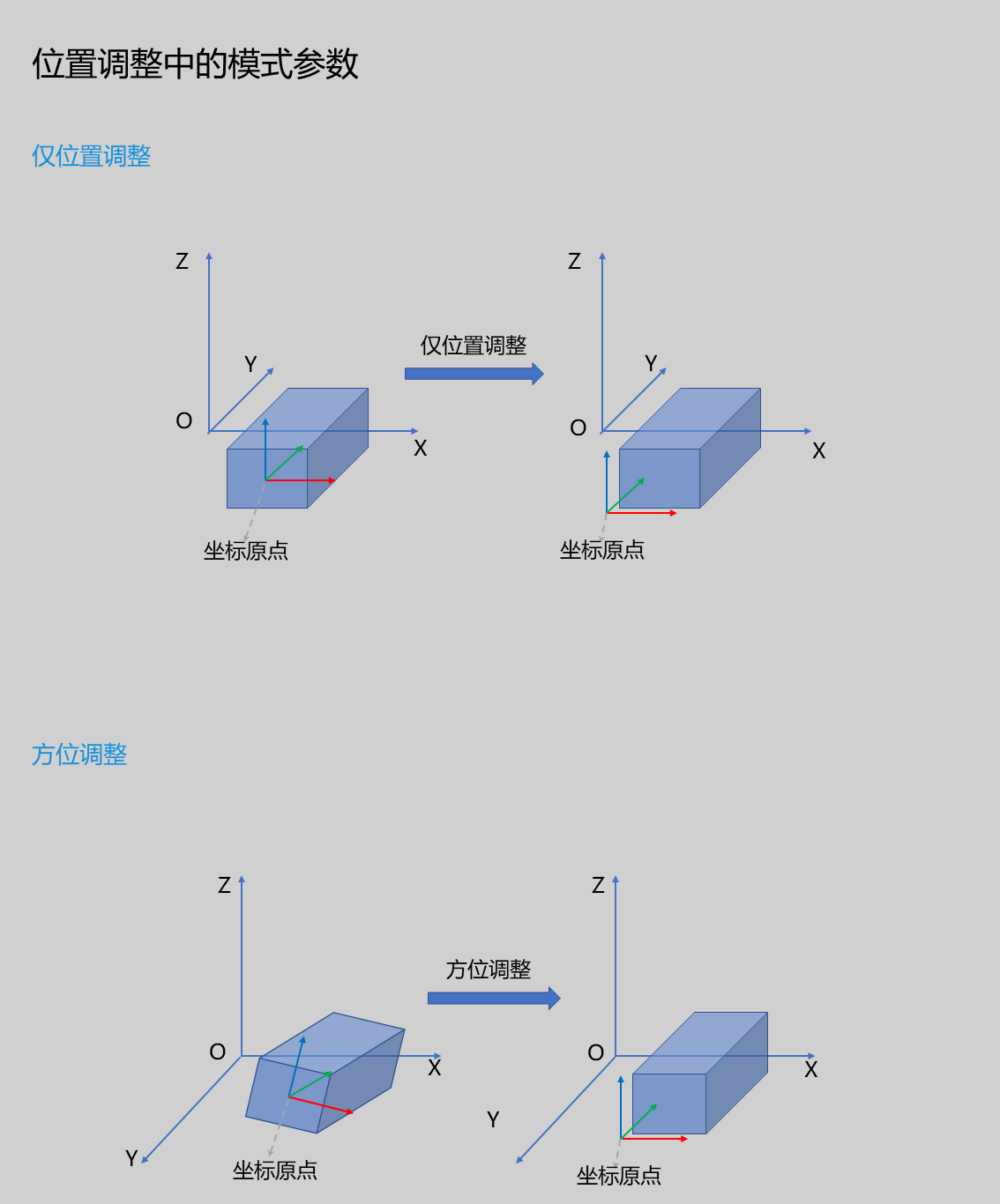 | ||
| 变换类型 | 永久:输出变换后的点云 临时:输出变换矩阵 注意:临时模式现在并不会输出变换矩阵到寄存器当中且并不会对原始点云进行变换。因此,在进行设置时,变换类型需要选择为 永久,后续版本会逐渐引入临时模式。 | |||
| 类型 | 线:将线的位置信息(线的中心点)作为原点 3D平面:将平面的位置信息(面的中心点)作为原点 盒子:由盒子的起始点和终点计算出中心点,将其作为原点 | |||
| 变换成分 | 调整X位置:仅将新原点的X坐标调整为0 调整Y位置:仅将新原点的Y坐标调整为0 调整Z位置:仅将新原点的Z坐标调整为0 | |||
| 输出图像 | 图像输出的IM编号 |
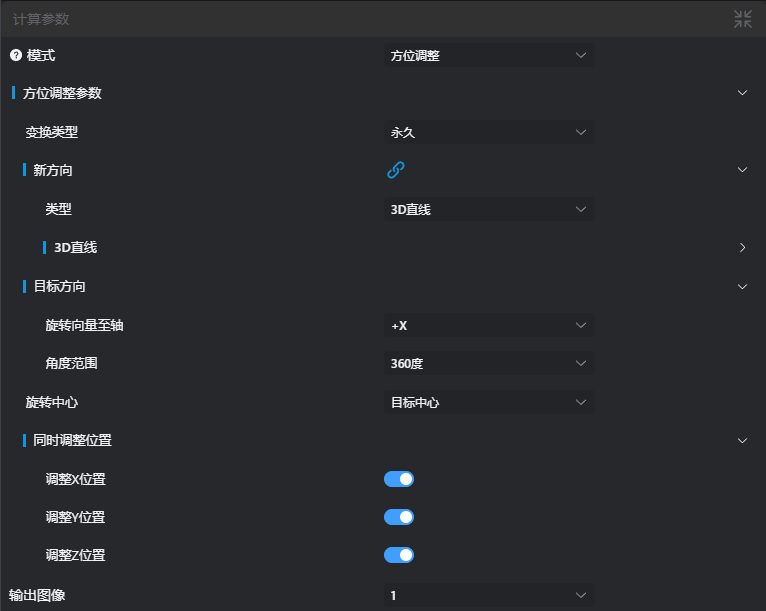
方位调整参数
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 模式 | 仅调整位置/方位调整 | 方位调整 | 仅调整位置:根据输入的新原点信息,对输入点云进行坐标变换 方位调整:根据输入的 新方向信息,对点云的方向和位置进行调整 | 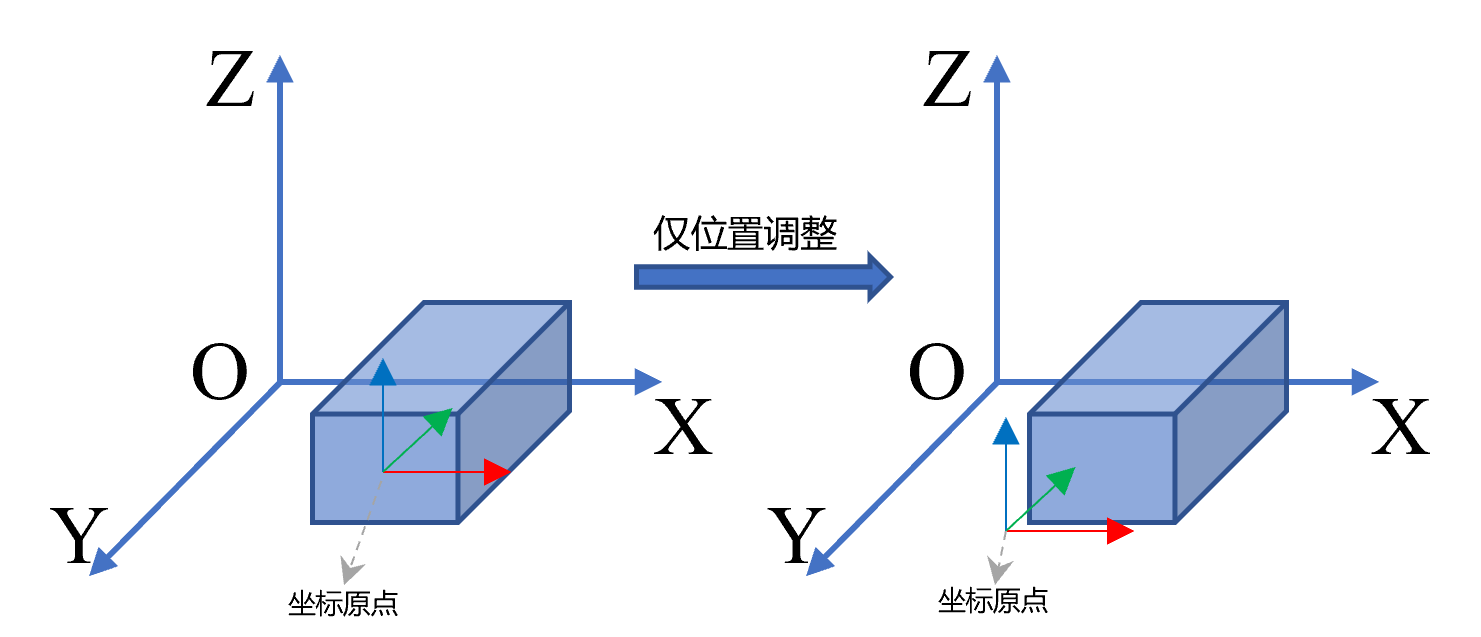 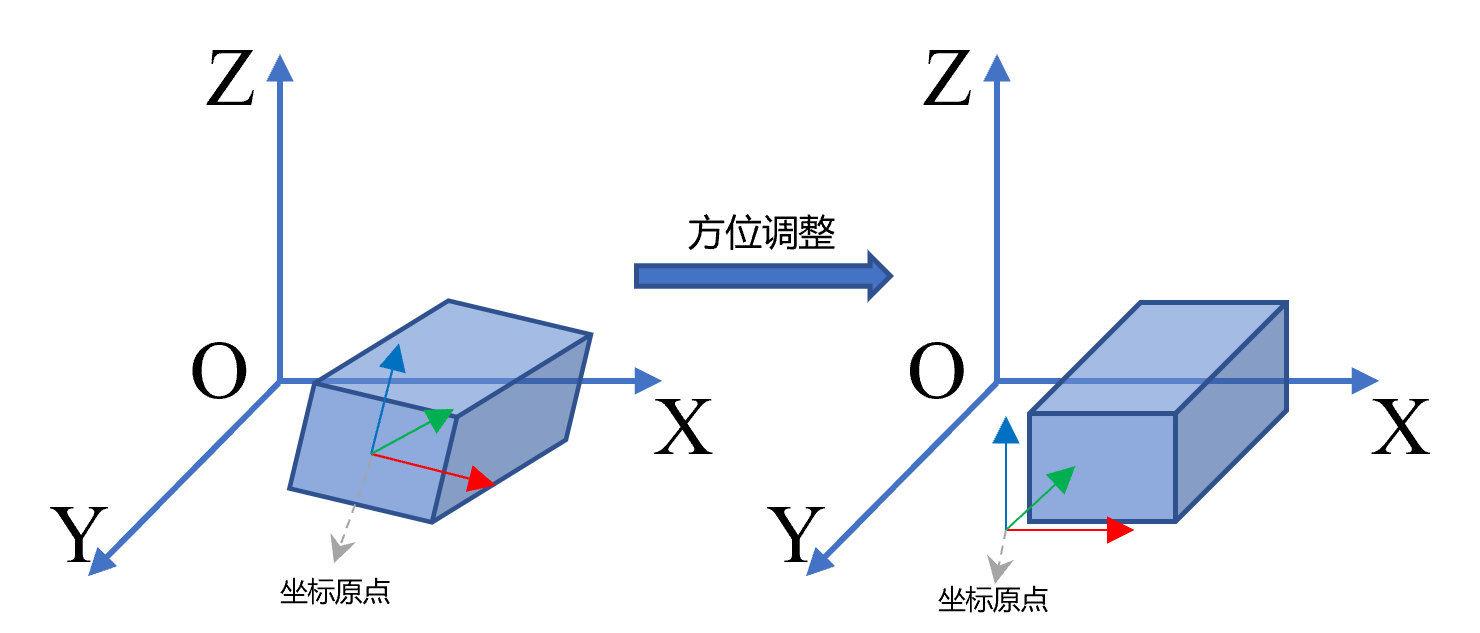 |
| 变换类型 | 永久:输出变换后的点云 临时:输出变换矩阵 | |||
| 类型 | 3D直线/3D平面 | 3D直线 | 3D直线:将直线的方向向量作为新的方向 3D平面:将平面的法向量作为新的方向 | |
| 旋转向量至轴 | +X/-X/+Y/-Y | +X | +X:目标方向向量为坐标轴+X方向 +Y:目标方向向量为坐标轴+Y方向 -X:目标方向向量为坐标轴-X方向 -Y:目标方向向量为坐标轴-Y方向 | |
| 角度范围 | 360度/180度 | 360度 | 360度:计算新方向和目标方向时,采用[0度, 360度]的角度范围 180度:计算新方向和目标方向时,采用[0度, 180度]的角度范围 | |
| 旋转中心 | 目标中心/原点(0,0,0)/ | 目标中心 | 目标中心:围绕新方向类型的位置中心进行旋转 原点(0,0,0):围绕Z轴旋转 特殊位置:设置自定义的旋转中心 | |
| 同时调整位置 | 调整X位置:仅将新原点的X坐标调整为0 调整Y位置:仅将新原点的Y坐标调整为0 调整Z位置:仅将新原点的Z坐标调整为0 | |||
| 输出图像 | 0-8 | 0 | 图像输出的IM编号 |
提示
更多参数类型详细说明,请参看类型定义
输出参数
| 名称 | 类型 | 范围 | 说明 |
|---|---|---|---|
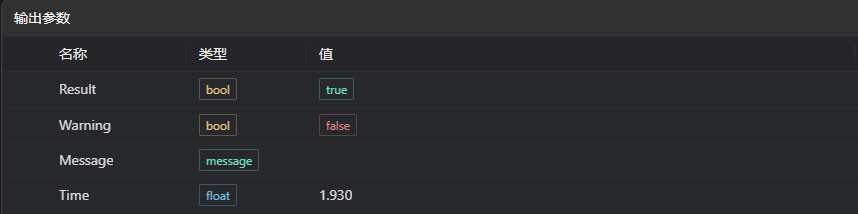
| Result | bool | true/false | true为成功 false为失败 |
| Warning | bool | true/false | true表示有警告 false表示没有 |
| Message | string | 输出成功或错误或警告信息,如果没有错误或警告为空 | |
| Time | float | 算子执行时间,单位: ms |
异常排查
| 序号 | 异常信息 | 对应参数 | 解决方法 |
|---|---|---|---|
| 1 | 输入的值是{0},无效的变换类型 | 变换类型 | 只支持permanent |
| 2 | 输入的值是{0},无效的新原点类型 | 新原点类型 | 只支持point3d、line3d、plane、Box |
| 3 | 输入的值是{0},无效的新方向类型 | 新方向类型 | 只支持line3d、plane |
| 4 | 输入的值是{0},无效的目标轴 | 旋转向量至轴 | 只支持+X、+Y、-X、-Y |
| 5 | 输入的值是{0},无效的角度范围 | 角度范围 | 只支持360度、180度 |
| 6 | 输入的值是{0},无效的特殊位置类型 | 只支持point3d、line3d、plane | |
| 7 | 方位调整失败 | 1. 检查输入点云是否为空 2. 检查新方向来源是否支持,只支持line3d、plane | |
| 8 | 输入的值是{0},无效的位置调整模式 | 模式 | 只支持position only、orientation |
| 9 | 输入的值是{0},无效的旋转点类型 | 旋转点类型来源 | 只支持object center、origin、specific position |
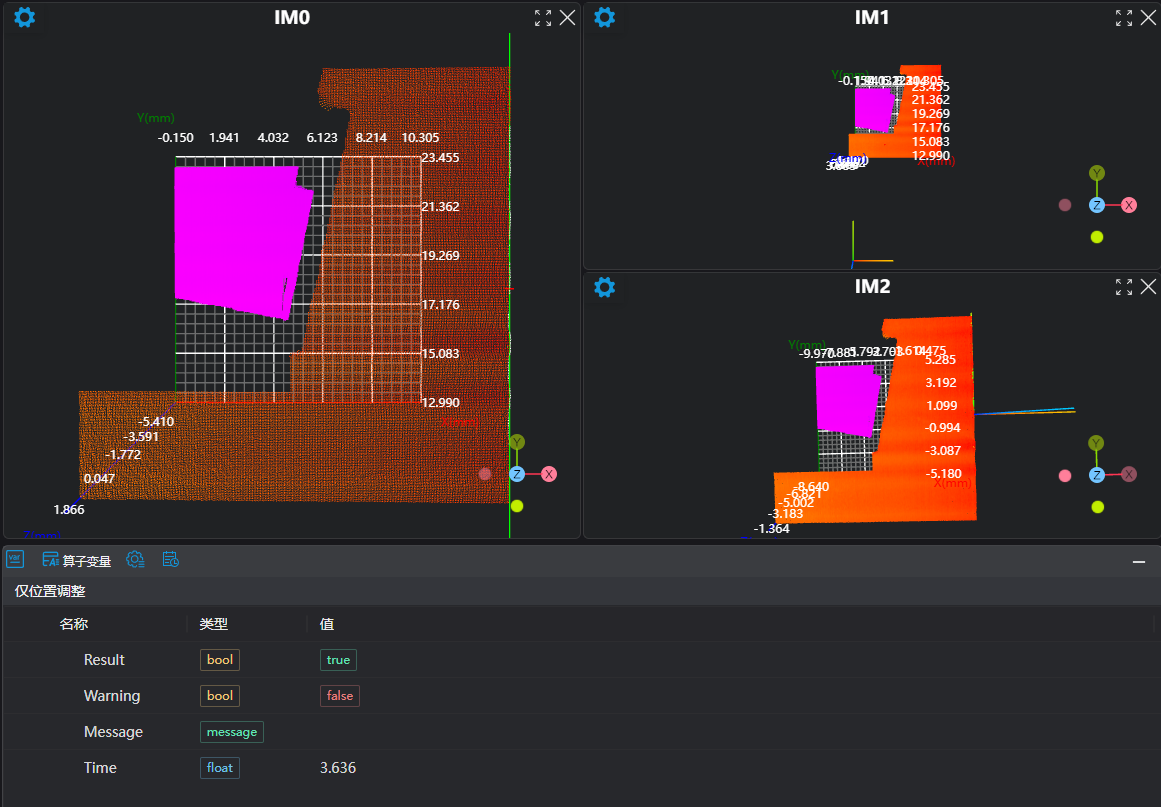
示例介绍
工程设计
选择
加载3D点云工具,加载需要处理的3d点云图到IM0。选择两个
3D方形探针工具,分别提取轮廓到IM1、IM2、IM获取点和线。选择两个
3D位置调整工具,分别设置模式为仅位置调整与方位调整。
工具使用
选择需要进行操作的输入图像,图像序号要与工程中图像所在IM序号一致
设置参数
点击
测试,查看图像窗口和参数是否符合预期没有问题后点击
保存,在运行列表中运行该算子,即可在对应的IM查看运行结果