3D圆
算子功能
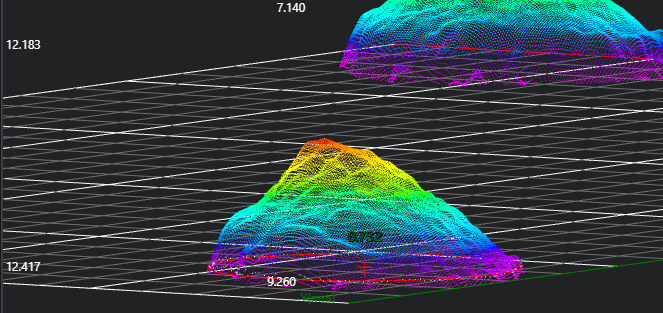
在Roi中寻找边缘点;根据寻找到的边缘点,拟合出3D圆形。
参数介绍
输入参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输入图像 | 0-8 | 0 | 图像输入的IM编号 | |
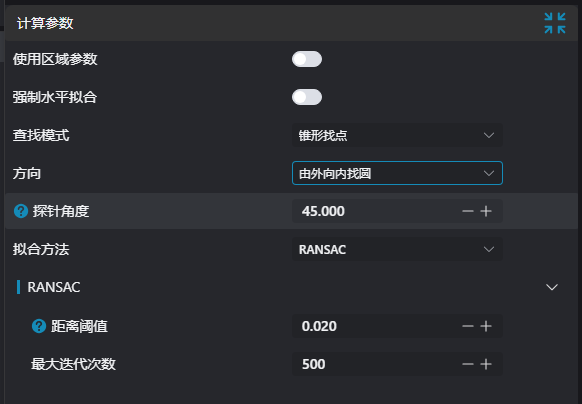
计算参数
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 使用区域参数 | true/false | false | 启用则以区域作为输入,不启用则以输入图像作为输入 | |
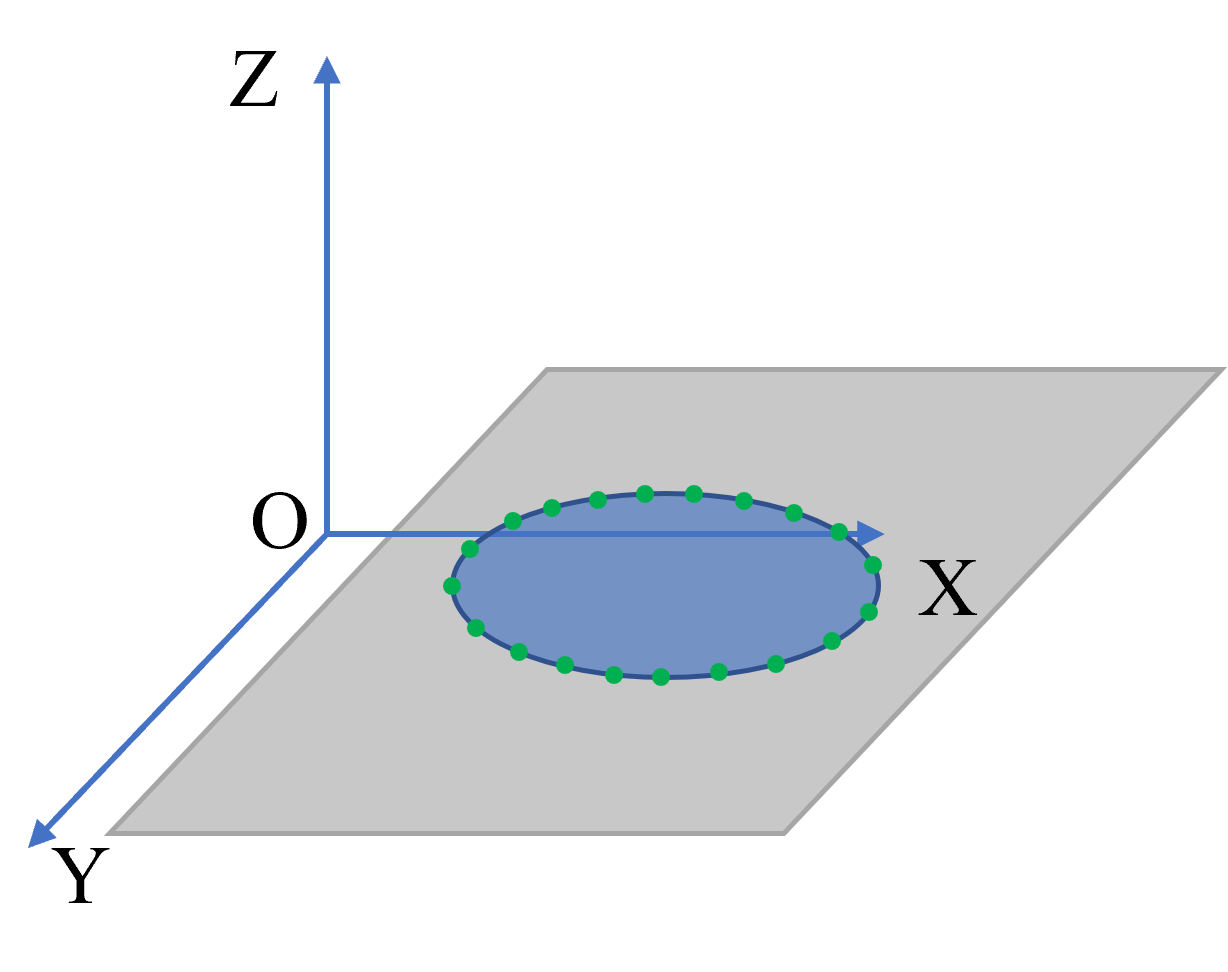
| 区域 | 2D窗口/盒子 | 盒子 | 手动框选合适的ROI区域 > 注意:请确保ROI中心点位于圆内。 可以通过绑定选择已存在的ROI区域输入数组时,输出的也是数组 | |
| 强制水平拟合 | true/false | false | 强制水平拟合是指在拟合平面或其他几何形状时,要求模型的法向量或主方向与水平面平行,通常用来确保模型在某些应用场景下是水平的。开启后将会从红色圆强制修正为蓝色圆 |  |
| 查找模式 | 锥形找点 | 锥形找点 | 锥形找点:使用锥形探针的方法寻找边缘点,通过控制探针的角度来定位点云中的边缘 | 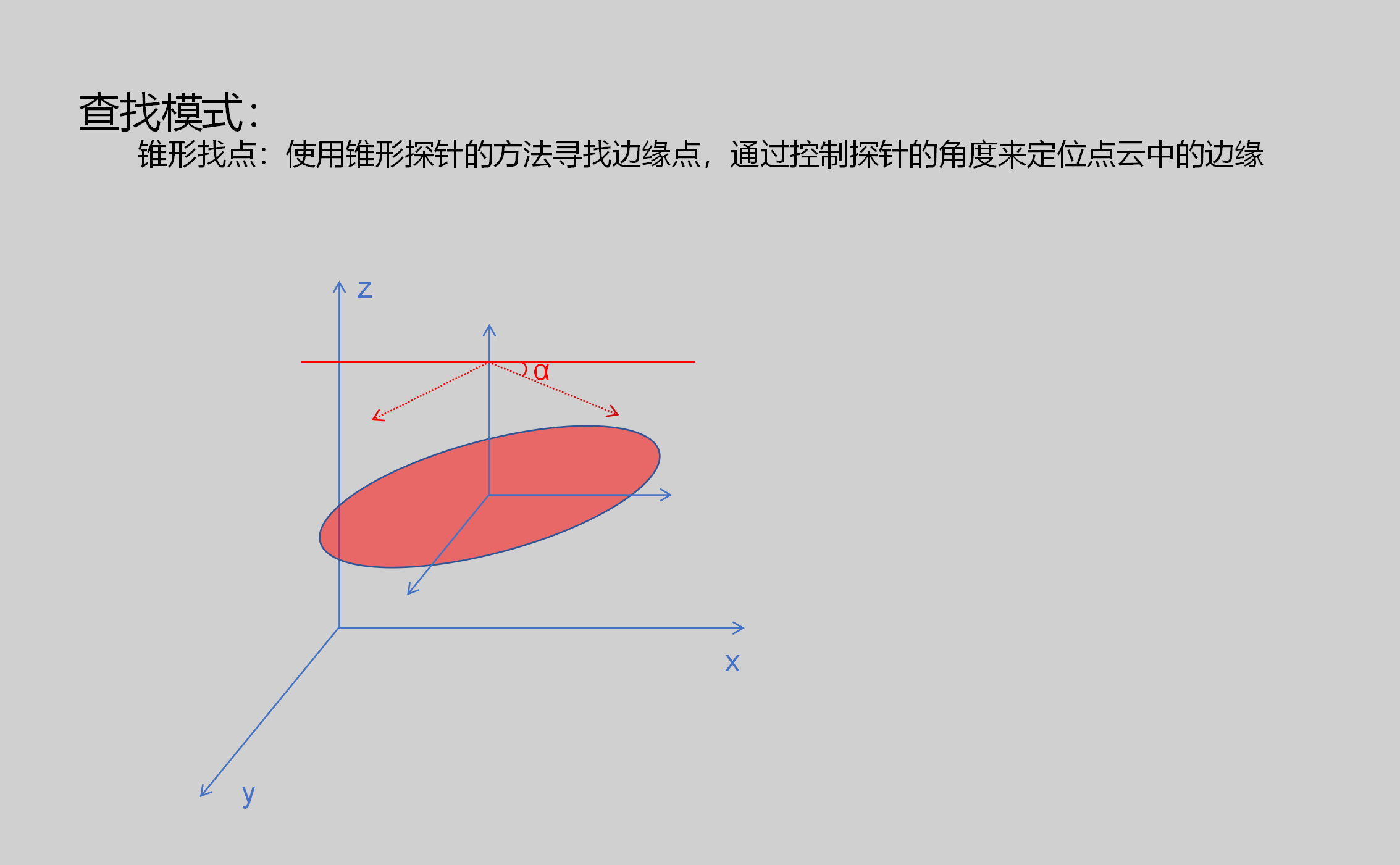 |
| 方向 | 由外向内找圆/由内向外找孔 | 由外向内找圆 | 由外向内找圆:从外向内找特征点 由内向外找圆:从内向外找特征点 | |
| 探针角度 | 45 | 控制探针的角度可以影响边缘点的定义,通常选择合适的角度范围以确保可以检测到真实的边缘点 | ||
| 拟合方法 | Ransac/最小二乘法 | Ransac | Ransac:用于从数据中拟合模型,尤其是在数据中存在噪声或离群点时 最小二乘法:通过最小化误差平方和来拟合模型,适用于误差较小且数据点较为集中、边缘点分布均匀、噪声较少的情况 | |
| 距离阈值 | 0.02 | 用于定义一个点与拟合模型的最远距离,超过此距离的点被认为是外点,不参与拟合 | 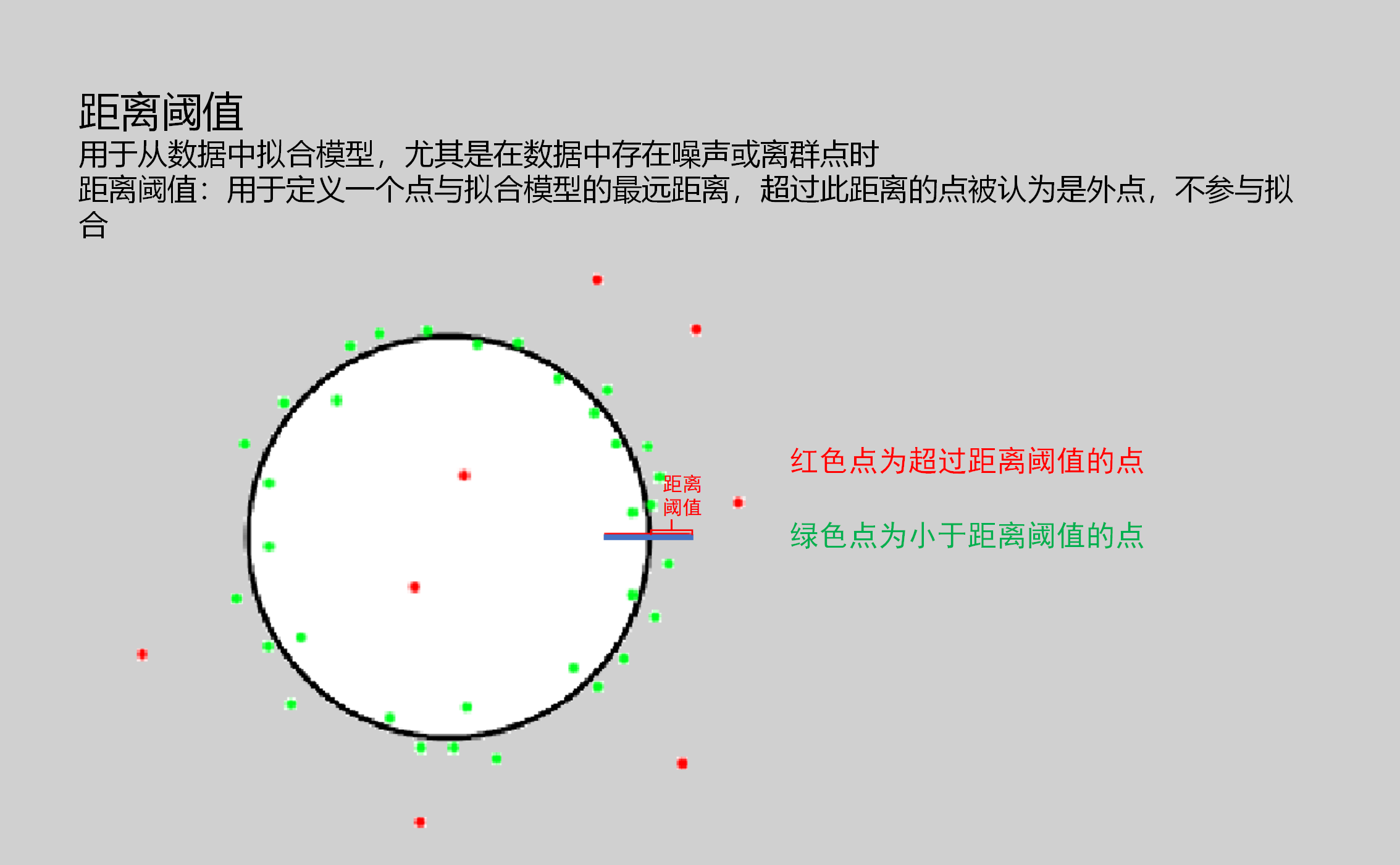 | |
| 最大迭代次数 | 500 | 用于设置RANSAC算法的最大迭代次数,通常迭代次数越多,拟合结果越精确,但计算开销也会增大 |
提示
更多参数类型详细说明,请参看类型定义
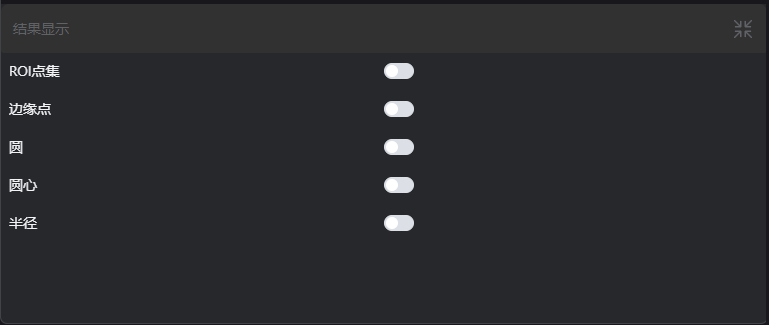
结果显示
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| ROI点集 | true/false | false | 仅在使用区域参数选中时生效,ROI框选的区域点集,若启用,则在图像中显示 | |
| 边缘点 | true/false | false | 边缘点,若启用,则在图像中显示 | |
| 圆 | true/false | false | 拟合的圆,若启用,则在图像中显示 | |
| 圆心 | true/false | false | 圆心,若启用,则在图像中显示 | |
| 半径 | true/false | false | 半径,若启用,则在图像中显示 |
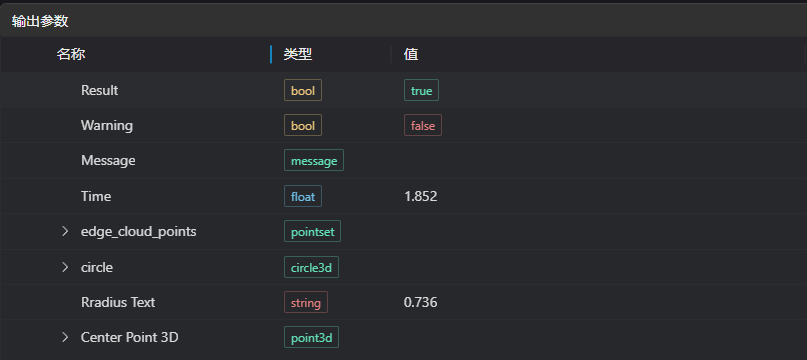
输出参数
| 名称 | 类型 | 范围 | 说明 |
|---|---|---|---|
| Result | bool | true/false | true为成功 false为失败 |
| Warning | bool | true/false | true表示有警告 false表示没有 |
| Message | string | 输出成功或错误或警告信息,如果没有错误或警告为空 | |
| Time | float | 算子执行时间,单位: ms | |
| edge_cloud_point | pointset | 3D圆的特征点 输入数组时,输出的也是数组 | |
| circle | circle3d | 找到3D圆的坐标和方向 输入数组时,输出的也是数组 | |
| Rradius Text | string | 半径值 | |
| Center Point 3D | point3d | 找到3D圆中心点 |
异常排查
| 序号 | 异常信息 | 对应参数 | 解决方法 |
|---|---|---|---|
| 1 | 输入的值是{0},无效的区域类型 | 区域类型 | 只支持window2d、box、pointset |
| 2 | Region点云为空 | 1. 检查点云为空 2. 检查ROI是否框选到点云 3. 检查绑定为空 | |
| 3 | 没有找到平面 | 健壮性内容,基本不会出现 | |
| 4 | 没有找到 | 调整拟合参数 |
示例介绍
工程设计
选择
加载点云工具,加载需要处理的3d点云图到IM0。选择
3D圆工具。
工具使用
选择需要进行操作的输入图像,图像序号要与工程中图像所在IM序号一致
选择区域类型为盒子,将盒子移动到待测位置,包围住待测点云区域。
使用技巧
1. 通过图像窗口上的ROI控制器来拖动或缩放盒子;
2. 直接在计算参数中修改盒子的起点或终点坐标来调整盒子位置和大小;
设置参数
在结果显示栏中勾选想要显示的内容
点击
测试,查看图像窗口和参数是否符合预期没有问题后点击
保存,在运行列表中运行该算子,即可在对应的IM查看运行结果