3D共面度-座面法
算子功能
使用座面法,计算共面性偏差
原理说明:
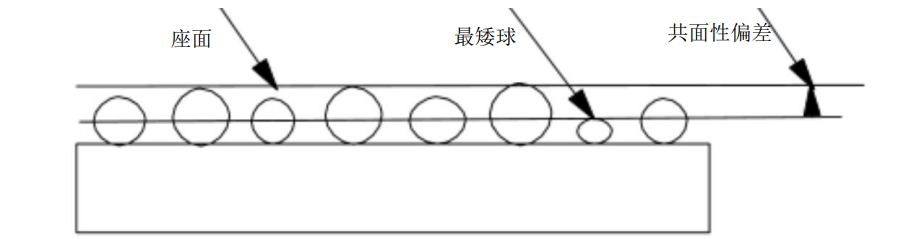
- 提取各个端子点云的最高点
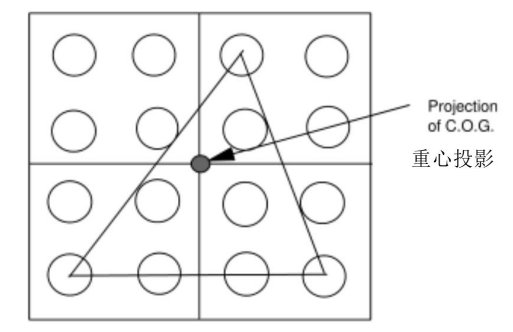
- 确定三个表现出最大垂直距离的端子顶点(定义座面的端子三角形必须包含重心的投影,以构成有效的座面。如果平面不被认为是有效的,则下一个具有最大垂直距离的端子将被视为候选端子,用于形成有效的座面)
- 三个顶底计算出座面
- 共面性偏差需要求座面到每个端子顶点的距离,其中,最大测量值是共面性偏差:
参数介绍
输入参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输入图像 | 0-8 | 0 | 图像输入的IM编号 | |
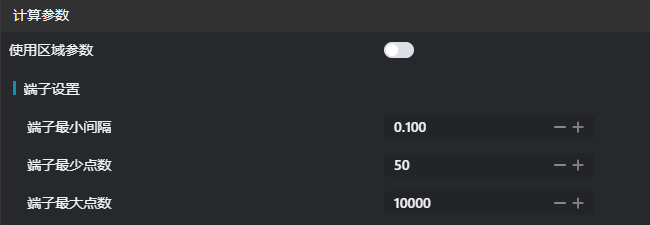
计算参数
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 区域 | 2D窗口/2D圆形窗口/2D多边形窗口/盒子/圆柱盒子/旋转盒子/点集(仅绑定) | 盒子 | 手动框选合适的ROI区域可以通过绑定选择已存在的ROI区域 | |
| 端子设置 | 设置分割端子的参数 | |||
| 端子最小间隔 | 0.0-1000000.0 | 0.1 | 区分不同端子的最小间距 | |
| 端子最少点数 | 1-1000000 | 100 | 限制端子点云的最小点数 | |
| 端子最大点数 | 1-1000000 | 10000 | 限制端子点云的最大点数 |
结果显示
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 顶点 | true/false | false | 输入各个点云的最高点,若启用,则在图像中显示 | |
| 中心 | true/false | false | 所有端子点云的质心,若启用,则在图像中显示 | |
| 座面 | true/false | false | 三个符合要求的端子顶点形成的平面,若启用,则在图像中显示 | |
| 共面性偏差 | true/false | false | 计算出的共面度值,若启用,则在图像中显示 | |
| 顶点三角形 | true/false | false | 三个符合要求的端子顶点形成的三角形 |
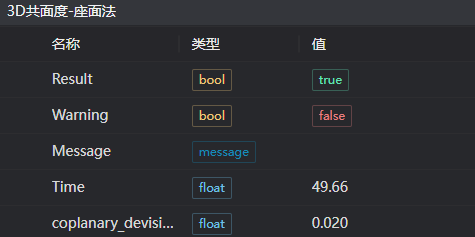
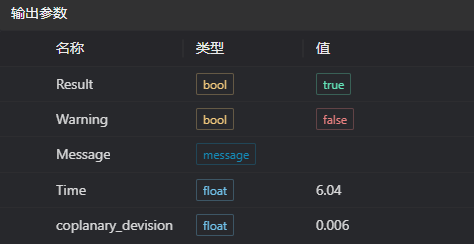
输出参数
| 名称 | 类型 | 范围 | 说明 |
|---|---|---|---|
| Result | bool | true/false | true为成功,false为失败 |
| Warning | bool | true/false | true表示有警告,false表示没有 |
| Message | string | 输出成功、错误或警告信息,如果没有错误或警告则为空 | |
| Time | float | 算子执行时间,单位:ms | |
| coplanarity_deviation | float | 共面度 |
提示
更多参数类型详细说明,请参看类型定义
异常排查
| 序号 | 异常信息 | 对应参数 | 解决方法 |
|---|---|---|---|
| 1 | 输入点云为空 | 确认IM是否存在有效点,若无有效点,请加载点云或切换存在有效点的IM | |
| 2 | 输入的区域类型是{0},无效区域类型 | 区域类型 | 区域输入类型为2D窗口/2D圆形窗口/盒子/圆柱盒子/旋转盒子/点集之一 |
| 3 | 区域为空 | 检查输入的ROI是否选中至少4个点云 | |
| 4 | 检测到的端子个数为{0},至少需要4个端子 | 区域个数 | 检查输入的点云或端子设置参数:端子点数限制或端子最小间距 |
| 5 | 输入的多边形顶点个数小于3,无法形成多边形 | 添加2d多边形窗口顶点数,使得顶点数至少为三个 | |
| 6 | 没有一组端子顶点符合要求 | - | |
| 7 | 输入的端子点数限制无效 | 设置端子点数的上限大于等于下限 |
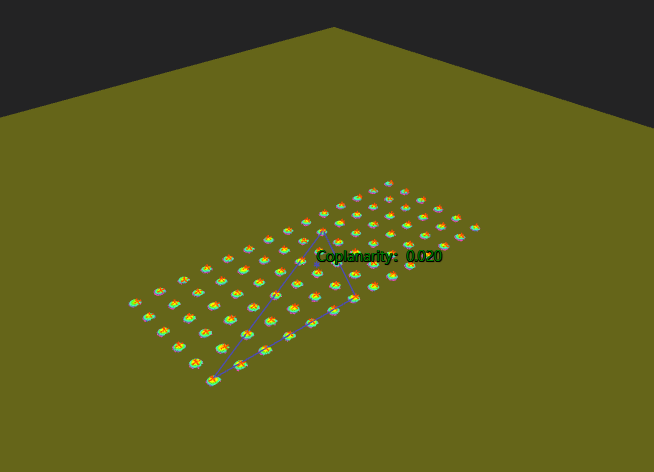
示例介绍
工程设计
选择
加载点云工具,加载需要处理的3d点云图到IM0。选择
3D共面度-座面法工具,设置不同输出类型。
工具使用
选择需要进行操作的输入图像,图像序号要与工程中图像所在IM序号一致
绑定需要测量的点云数组
设置参数
在结果显示栏中勾选想要显示的内容
点击
测试,查看图像窗口和参数是否符合预期没有问题后点击
保存,在运行列表中运行该算子,即可在对应的IM查看运行结果