Appearance
3D斑点
输入:
图像源
选择需要进行操作的图像,图像序号与IM序号一致。

待测区域
手动选择区域:
可自行选择窗口或盒子类型,可以在图像上直接拖动,缩放窗口与盒子大小,也可以在编辑框内手动填入。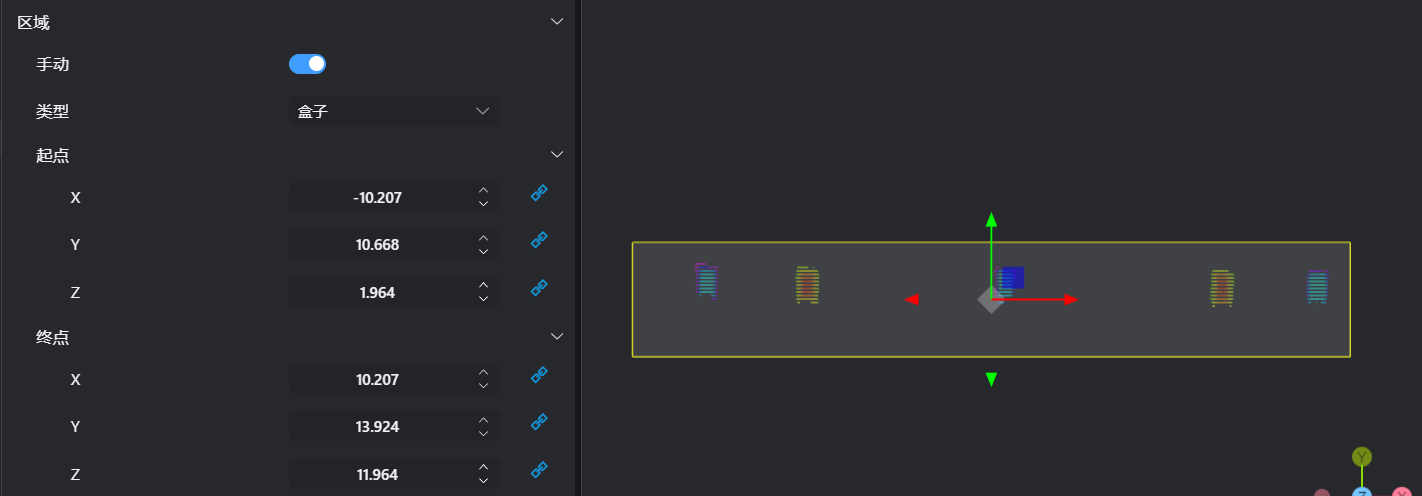
寄存器中读取区域:
通过寄存器中对应序号的信息选择区域。
操作:
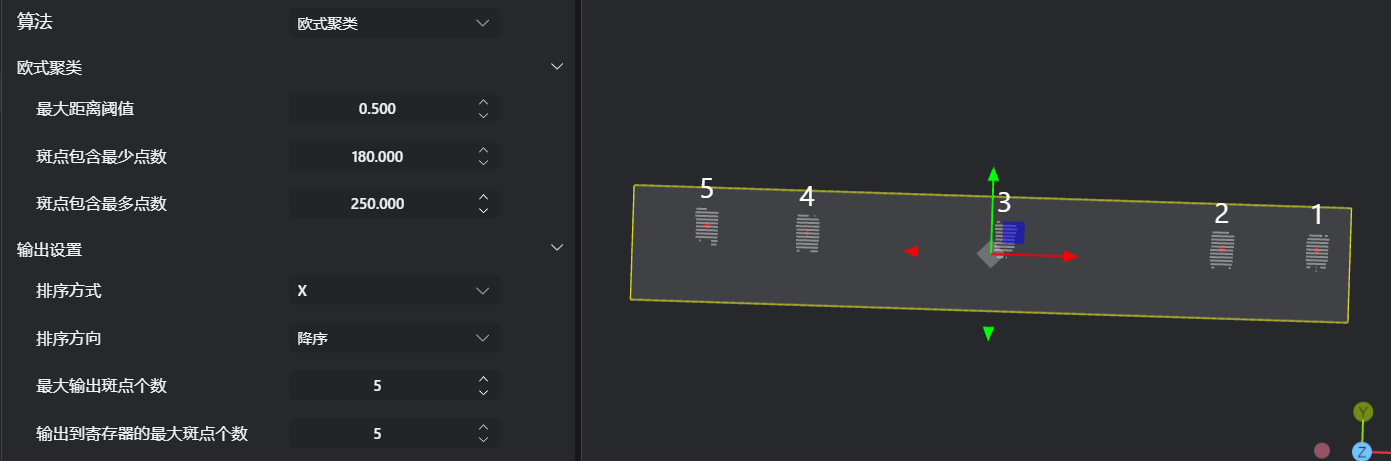
算法选择
- 目前算法为欧式聚类。
阈值选择
- 选择阈值大小,点云之间的距离超过该阈值则认为是另一块点云,将会分隔开。
点云数量范围选择
- 选择需要查找的点云点的个数的上下限。
- 选择需要查找的点云点的个数的上下限。
斑点输出方式,数量选择
选择输出点云的排序方式,可按点数,xyz轴或不排序。
选择输出点云的排序方向,升序或降序。
选择最大可输出点的个数以及输出到寄存器中点的个数。
输出(可手动开启或关闭):
斑点中心点
输出斑点的中心点至寄存器中。斑点区域大小
输出斑点区域的大小至寄存器中。