Appearance
PIN针匹配
一、初始化
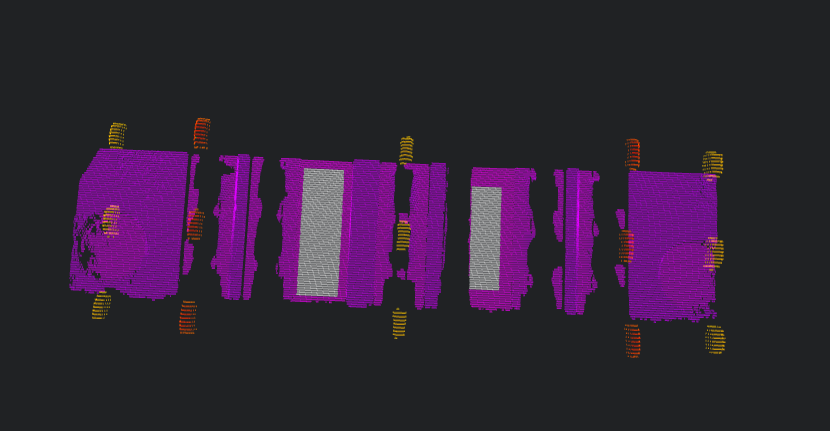
[00] 选择加载点云工具,加载需要操作的点云图至指定IM上。
二、预处理
[01-02] 选择3D区域工具和3D平面工具,选择需要拟合的区域,并将区域拟合成一个平面。
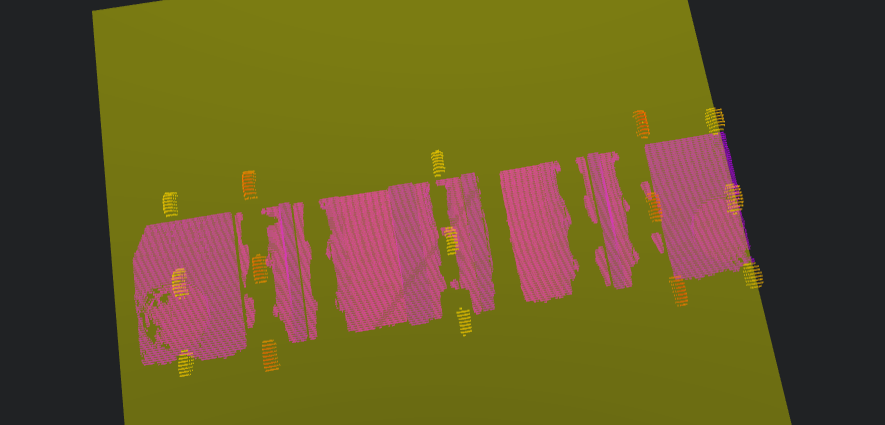
[03-04] 选择3D方形探针工具和3D位置调整工具,选择连接器上边一点作为原点,进行X轴与Y轴的位置调整。
[05] 选择3D裁切工具,将Pin针部分裁切输出到IM1中。
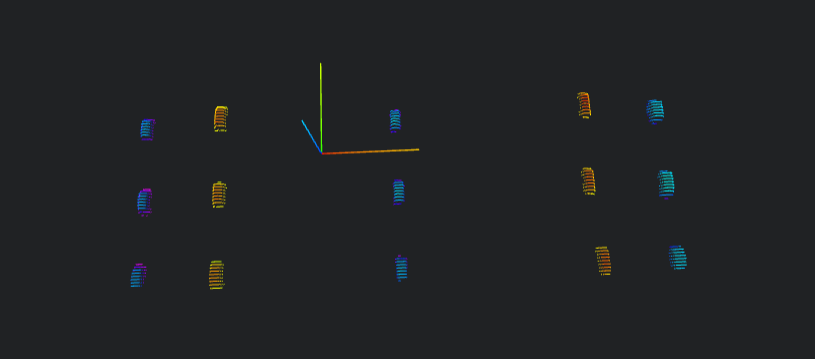
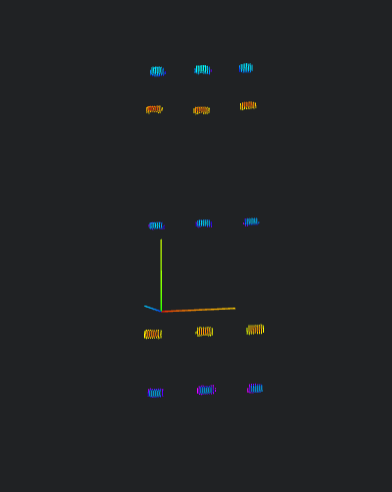
[06] 选择3D变换工具,将Pin针绕Z轴旋转90度。
三、Pin针配方创建
输入:
图像源
选择需要进行操作的图像,图像序号与IM序号一致。

区域:
- 可以手动也可以直接从寄存器中读取。

- 可以手动也可以直接从寄存器中读取。
操作:
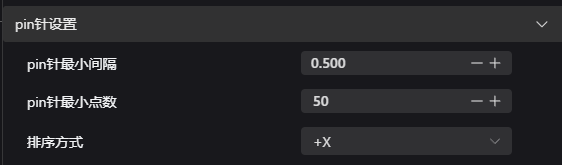
pin针设置
pin针最小间隔
- 两个Pin针之间的最小距离间隔。
pin针最小点数
- 设置需要查找的点云点的个数的下限。
- 设置需要查找的点云点的个数的下限。
排序方式
选择输出点云的排序方式,可按+X,-X,+Y,-Y排序。
输出:
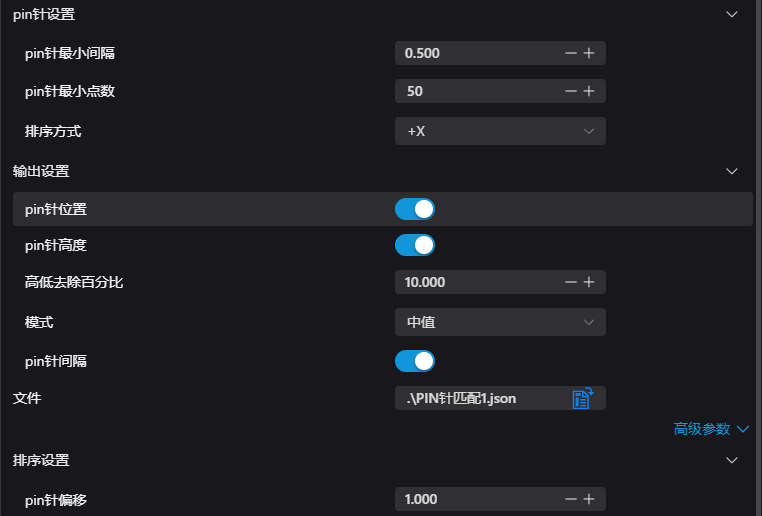
输出设置
pin针位置
选中后输出pin针位置(x,y)到配方文件以及图像。
pin针高度
选中后输出pin针高度到配方文件以及图像。
高低去除百分比
取去除高低百分比后的点云进行高度计算。
pin针间隔
选中后输出pin针间隔到配方文件以及图像。
文件
设置要输出的配方文件路径。
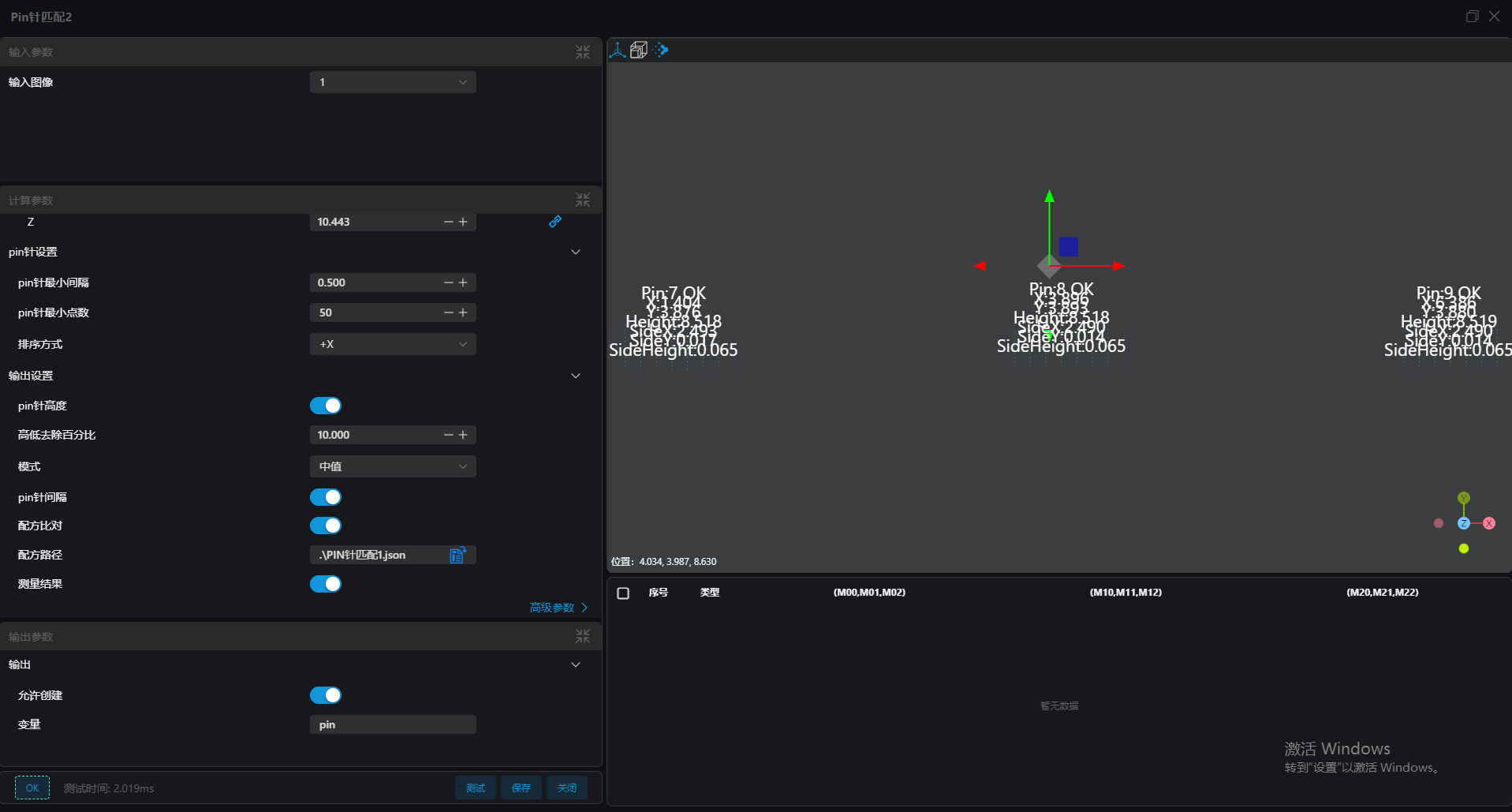
四、Pin针匹配2
输入:
图像源
选择需要进行操作的图像,图像序号与IM序号一致。
区域:
- 可以手动也可以直接从寄存器中读取。
- 可以手动也可以直接从寄存器中读取。
操作:
pin针设置
pin针最小间隔
- 两个Pin针之间的最小距离间隔。
pin针最小点数
- 设置需要查找的点云点的个数的下限。
- 设置需要查找的点云点的个数的下限。
排序方式
选择输出点云的排序方式,可按+X,-X,+Y,-Y排序。
输出设置:
pin针位置
选中后输出pin针位置(x,y)。
pin针高度
选中后输出pin针高度。
高低去除百分比
取去除高低百分比后的点云进行高度计算。
pin针间隔
选中后输出pin针间隔。
配方比对
设置与输出变量进行比对的配方文件路径。
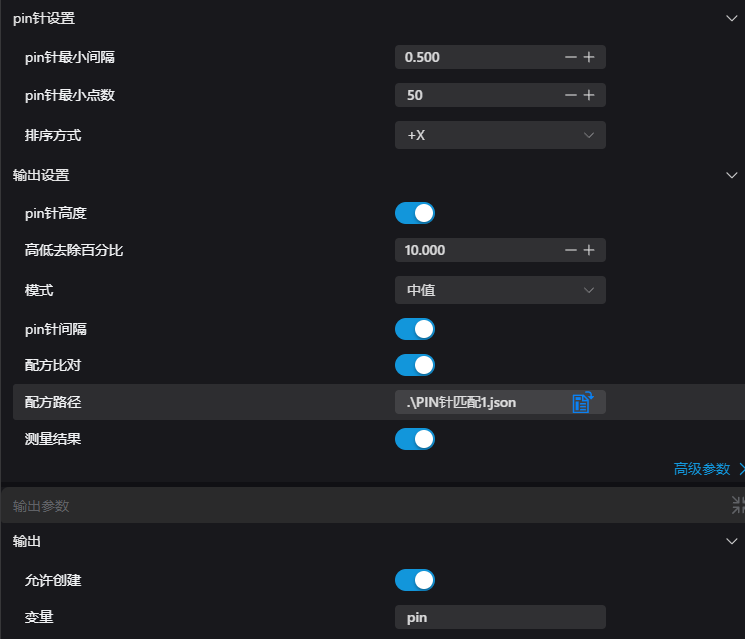
输出:
- 结果
将检测的结果后的结果显示在图像中。
将检测的结果输出到创建的变量中,可以在全局变量中找到该变量。
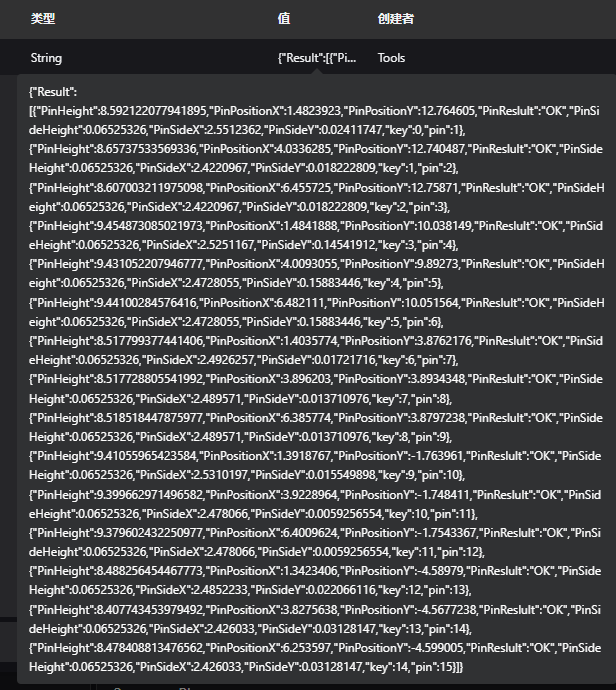
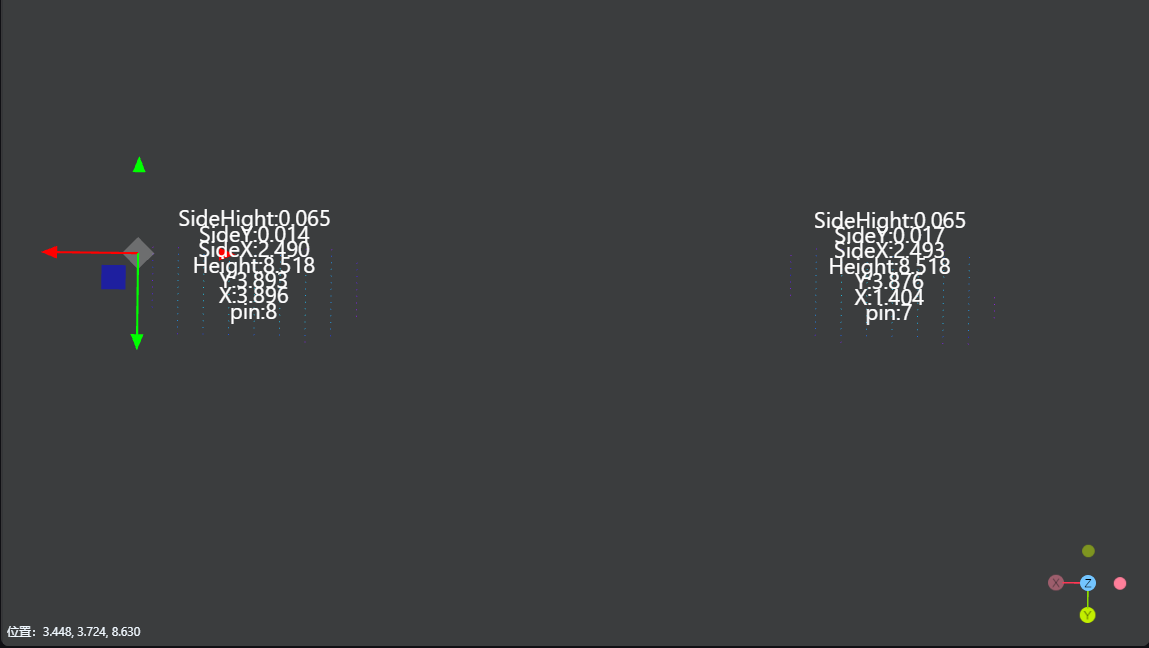
四、结果查看
[07] 选择lua语言脚本工具,直接查看输出变量的值。
lua
pinStr1 = GetVariable("123")
pinJson1 = ParseJson(pinStr1)
println(pinJson1)