3D平面面轮廓度
算子功能
计算形位公差-平面面轮廓度
如下图所示,计算理论点到实际平面的距离,从大到小排序,记为𝑑1、𝑑2、…、𝑑n,则面轮廓度计算公式为:
2 × 𝑚𝑎𝑥(𝑑1, 𝑑2, …, 𝑑n)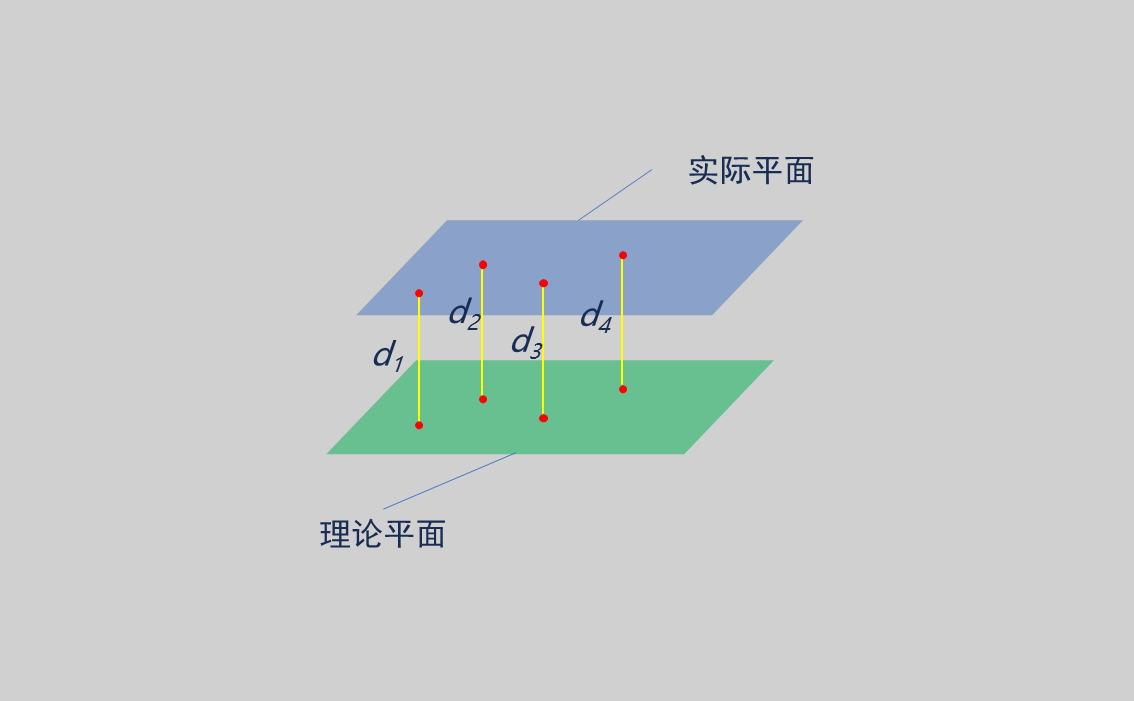
参数介绍
输入参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 输入图像 | 0-8 | 0 | 图像输入的IM编号 | |
计算参数

| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
| 实际平面 | 平面 | - | 实际平面的面上一点和法向量 | |
| 理论平面 | json文件 | - | 理论平面文件 | |
| 贴合点云 | true/false | false | 开启则使用贴合点云功能,理论平面对选取的点云尽可能贴合 | |
| 使用区域参数 | true/false | false | 启用贴合点云时开启,开启则启用框选点云,关闭则选取整个IM的点云 | |
| 区域 | 2D窗口/2D圆形窗口/2D多边形窗口/盒子/圆柱盒子/旋转盒子/点集(仅绑定) | 盒子 | 手动框选需要贴合的点云 | |
| 理论平面拟合方法 | 最小二乘法/RANSAC | 最小二乘法 | 使用对应算法拟合平面 | |
| 距离阈值 | 0.0-50.0 | 0.02 | 选择合适的距离阈值,当噪点多时,调大该参数,当噪点少则调小该参数 | |
| 最大迭代次数 | 100-10000 | 1000 | 设置迭代次数的最大值 |
结果显示
| 参数 | 范围 | 默认值 | 说明 | 图示 |
|---|---|---|---|---|
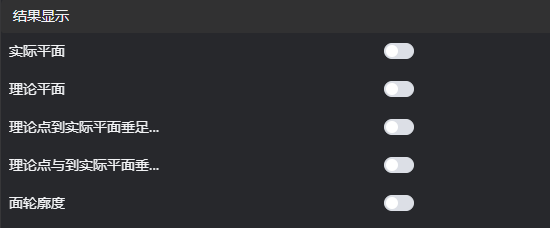
| 实际平面 | true/false | false | 输入的实际平面,若启用,则显示在IM上 | |
| 理论平面 | true/false | false | 输入的理论平面,若启用,则显示在IM上 | |
| 理论点到实际平面垂足和理论平面点 | true/false | false | 显示两组点:输入的测量点和测量点到实际平面的垂足和输入理论平面点,若启用,则显示在IM上 | |
| 理论点与实际平面垂足连线 | true/false | false | 输入的理论点到实际平面的垂足连线,若启用,则显示在IM上 | |
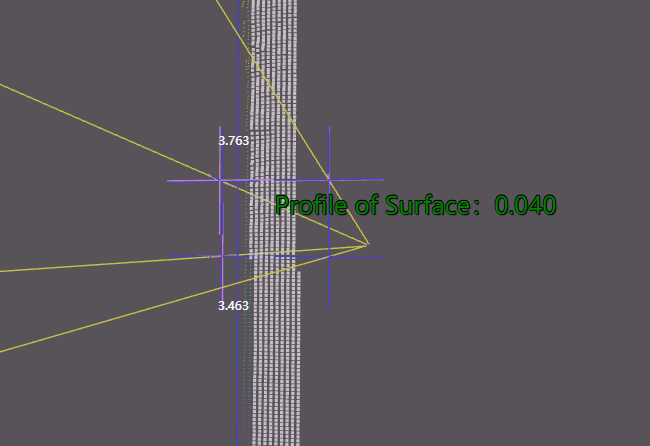
| 面轮廓度 | true/false | false | 输出的面轮廓度,若启用,则显示在IM上 |
输出参数

| 名称 | 类型 | 范围 | 说明 |
|---|---|---|---|
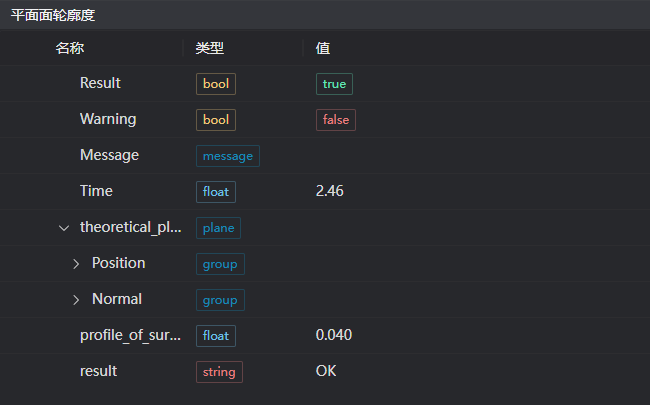
| Result | bool | true/false | true为成功 false为失败 |
| Warning | bool | true/false | true表示有警告 false表示没有 |
| Message | string | 输出成功或错误或警告信息,如果没有错误或警告为空 | |
| Time | float | 算子执行时间,单位: ms | |
| theoretical_plane | plane | 测量点到参考平面的距离 | |
| profile_of_surface | float | 面轮廓度 | |
| result | string | OK/NG | 面轮廓度是否在范围内 |
提示
更多参数类型详细说明,请参看类型定义
异常排查
| 序号 | 异常信息 | 对应参数 | 解决方法 |
|---|---|---|---|
| 1 | 输入点云为空 | 确认IM是否存在有效点,若无有效点,请加载点云或切换存在有效点的IM | |
| 2 | 输入的实际平面类型为{0},无效的平面类型 | 平面类型 | 检查平面类型是否为平面 |
| 3 | 输入的理论平面拟合方法为{0},无效的拟合方法 | 拟合方法 | 检查拟合方法是否为最小二乘法/RANSAC |
| 4 | 输入的实际平面法向量无效 | 检查平面法向量是否全为0 | |
| 5 | 输入轮廓度范围的最小值大于最大值,无效的轮廓度范围 | 设置平行度范围最小值小于等于最大值 | |
| 6 | 参数 {0} 不能为空 | 路径 | 检查路径是否为空 |
| 7 | 文件 {0} 不存在或无法访问 | 路径 | 检查路径是否有效 |
| 8 | 输入的理论平面点云为空 | 检查理论位置点json文件是否为空 | |
| 9 | 输入的区域类型是{0},无效区域类型 | 区域类型 | 检查区域类型是否为2D窗口/2D圆形窗口/2D多边形窗口/盒子/圆柱盒子/旋转盒子/点集其中之一 |
| 10 | 输入的多边形顶点个数小于3,无法形成多边形 | 添加2d多边形窗口顶点数,使得顶点数至少为3 | |
| 11 | 输入的区域点云为空 | 1. 检查是否框选为空 2. 检查点集是否为空 |
示例介绍
工程设计
选择
加载点云工具,加载需要处理的3d点云图到IM0;选择
3D方形探针工具,拟合实际平面。选择
3D平面面轮廓度工具。
工具使用
选择需要进行操作的输入图像,图像序号要与工程中图像所在IM序号一致
不启用使用区域参数或启用区域并选择区域类型为盒子,将盒子移动到待测位置,包围住待测点云
使用技巧
1. 通过图像窗口上的ROI控制器来拖动或缩放盒子;
2. 直接在计算参数中修改盒子的起点或终点坐标来调整盒子位置和大小
设置参数
在结果显示栏中勾选想要显示的内容
点击
测试,查看图像窗口和参数是否符合预期没有问题后点击
保存,在运行列表中运行该算子,即可在对应的IM查看运行结果