3D Percentile Filter
Operator Function
Filter the input point cloud based on different filter axes and high/low removal percentages, retaining the point cloud between the high and low percentiles for output.
Parameter Introduction
Input Parameters

| Parameter | Range | Default Value | Description | Illustration |
|---|---|---|---|---|
| Input Image | 0-8 | 0 | The IM number for image input | |
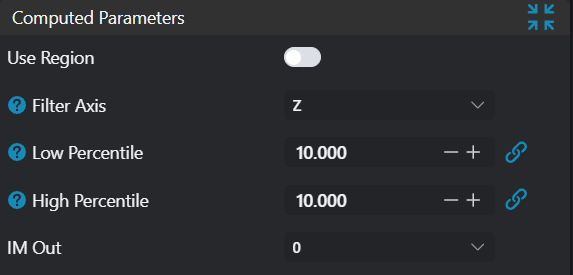
Calculation Parameters
| Parameter | Range | Default Value | Description | Illustration |
|---|---|---|---|---|
| Use Region Parameters | true/false | false | If enabled, use Region as input; if not enabled, use Input Image as input | |
| Region | 2D Window/Box | Box | Manually select an appropriate ROI regionCan bind to select existing ROI regions | |
| Filter Axis | X/Y/Z | Z | Filter point cloud along specified axis direction X: Filter based on point cloud's X coordinatesY: Filter based on point cloud's Y coordinatesZ: Filter based on point cloud's Z coordinates | 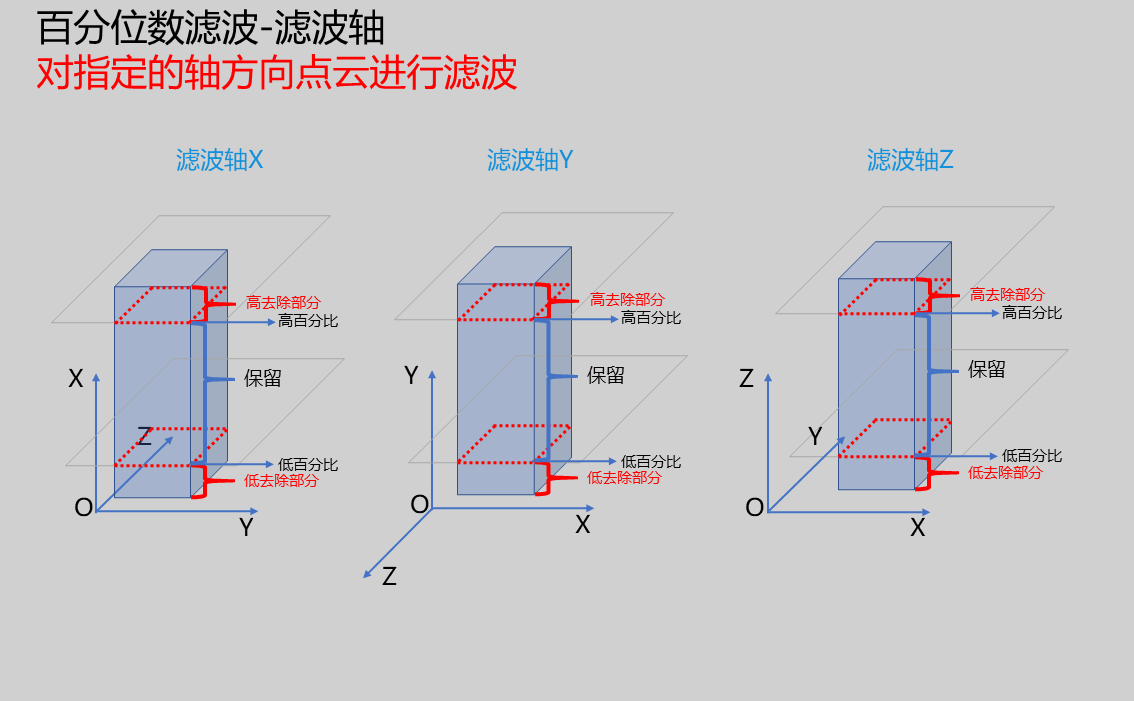 |
| Low Percentage | 0-50 | 10.000 | Calculate the low threshold for percentile filter based on this value, as shown in the figure above. Points below this threshold will be removed. | 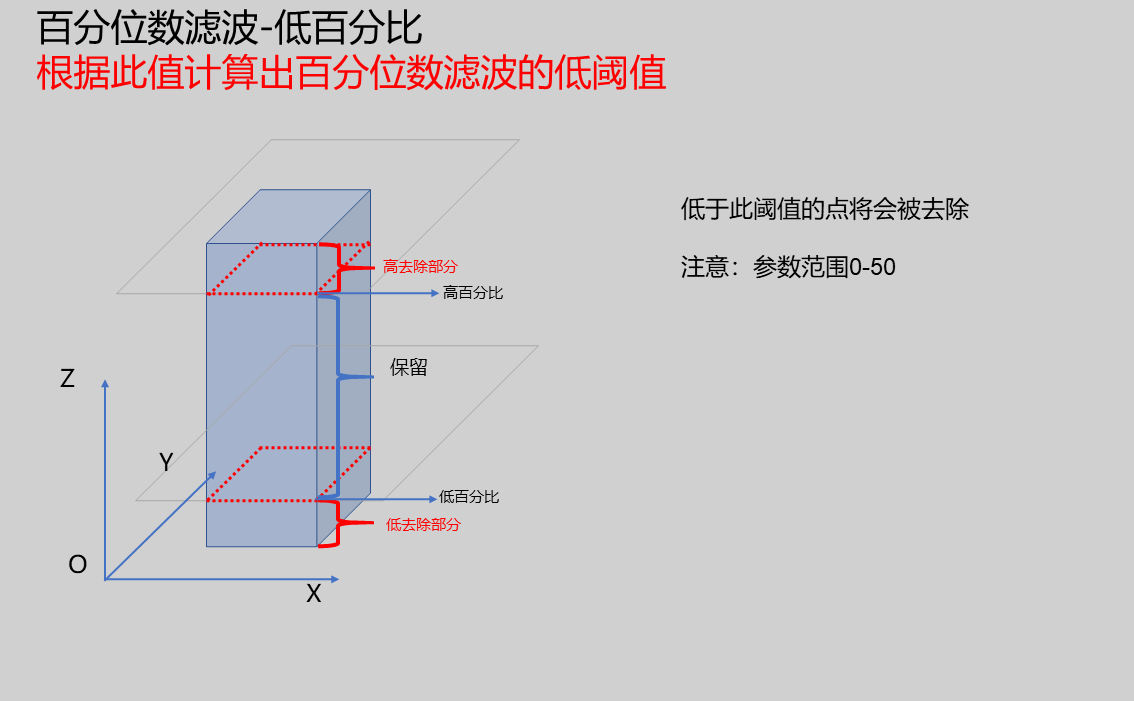 |
| High Percentage | 0-50 | 10.000 | Calculate the high threshold for percentile filter based on this value, as shown in the figure above. Points above this threshold will be removed. | 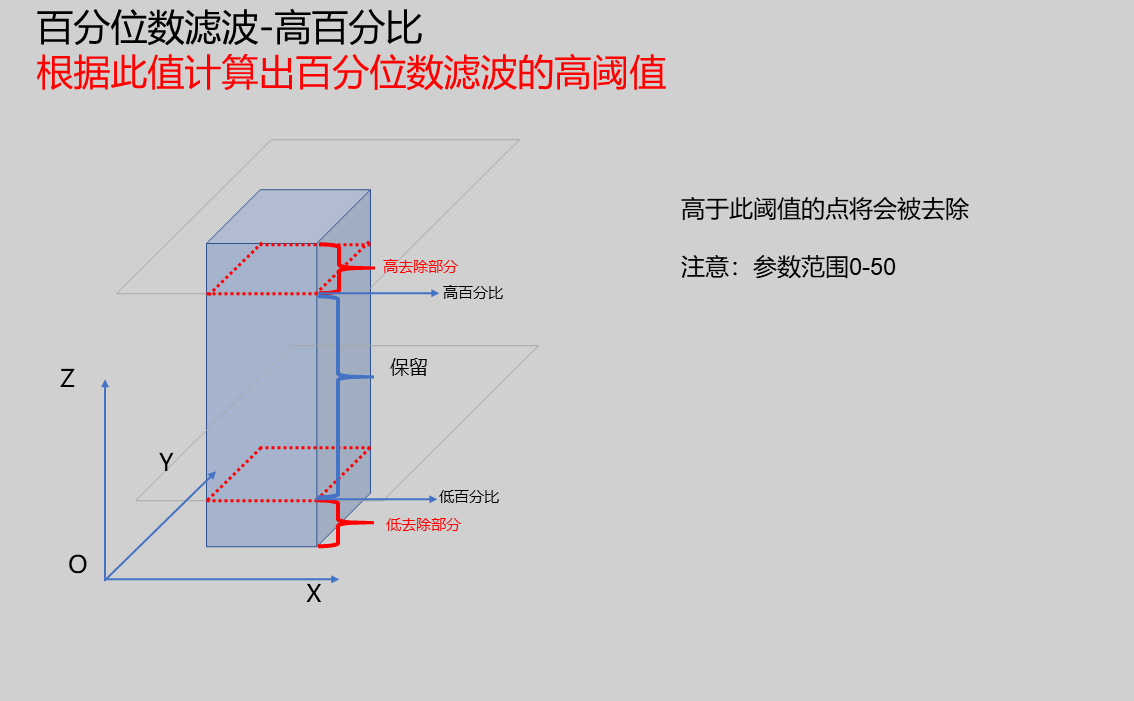 |
| Output Image | 0-8 | 0 | The IM number for image output |
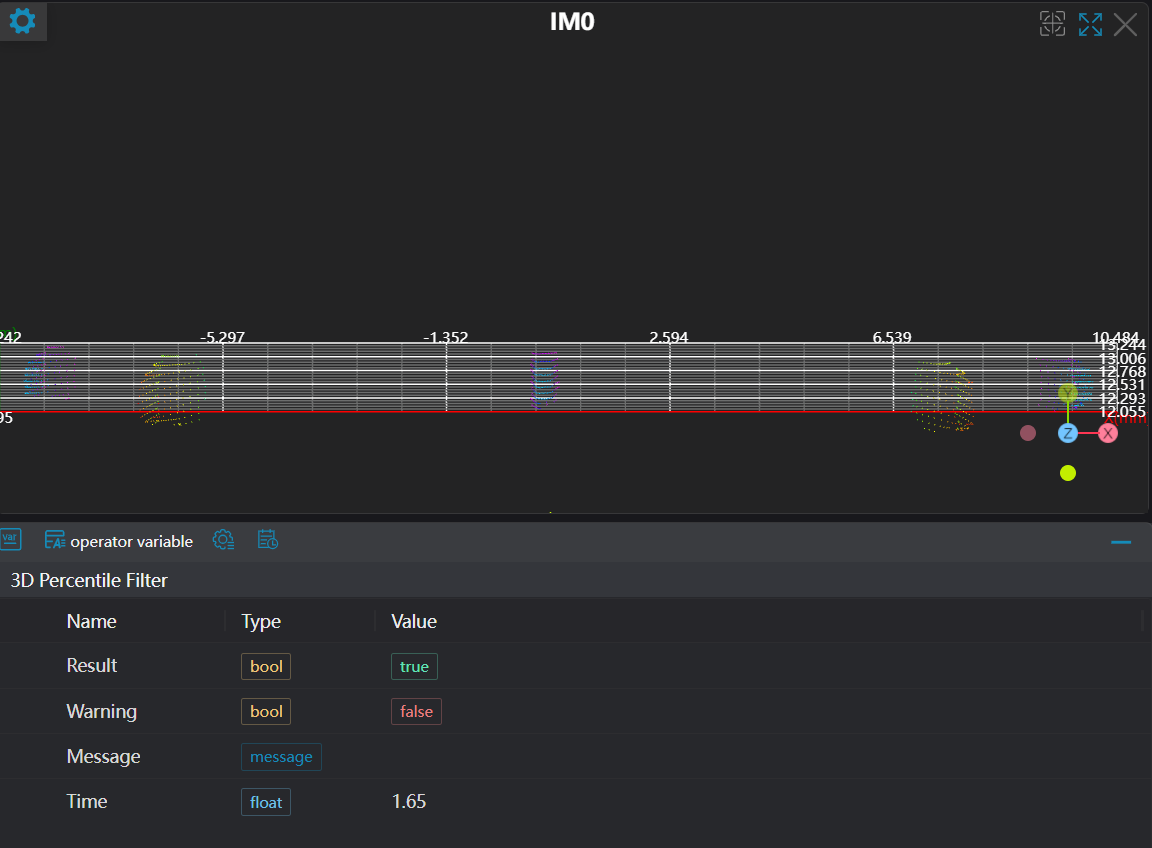
Result Display

| Parameter | Range | Default Value | Description | Illustration |
|---|---|---|---|---|
| ROI Point Set | true/false | false | Only effective when Use Region Parameters is selected; the point set of the ROI selected region; if enabled, displayed in the image |
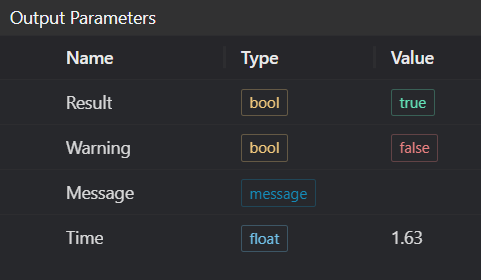
Output Parameters
| Name | Type | Range | Description |
|---|---|---|---|
| Result | bool | true/false | true for success false for failure |
| Warning | bool | true/false | true indicates there is a warning false indicates there is none |
| Message | string | Outputs success, error, or warning information; if there is no error or warning, it is empty | |
| Time | float | Operator execution time, unit: ms |
Exception Troubleshooting
| No. | Exception Information | Corresponding Parameter | Solution |
|---|---|---|---|
| 1 | The input value is {0}, invalid region type | Region Type | Only supports window2d, box, pointset |
| 2 | Region is empty | 1. Check if input point cloud is empty 2. Check if ROI region encloses any point cloud 3. Check if bound pointset is empty | |
| 3 | Low percentile and high percentile cannot both be 50%. | Adjust high and low percentages; cannot both be 50 | |
| 4 | Percentile filtering failed | Check if point cloud contains invalid points. Invalid points are those with nan in coordinates | |
| 5 | Output point cloud is empty! Please modify parameters! | 1. Check if input point cloud is empty 2. Check if ROI position encloses any point cloud 3. Check if point cloud contains invalid values |
Example Introduction
Engineering Design
Select the
Load 3D Point Cloudtool to load the 3D point cloud image to be processed into IM0.Select the
3D Percentile Filtertool.
Tool Usage
Select the input image for operation; the image number must match the IM number where the image is located in the project.
Select the region type as Box, move the box to the position to be measured, enclosing the part of the point cloud that needs filtering.
Usage Tips
- Use the ROI controller on the image window to drag or scale the box;
- Directly modify the start or end coordinates of the box in the calculation parameters to adjust the box position and size;
Set parameters
Check the content you want to display in the result display section
Click
Testto check if the image window and parameters meet expectationsIf there are no issues, click
Save, then run the operator in the run list to view the results in the corresponding IM