3D Point Cloud Organization
Operator Function
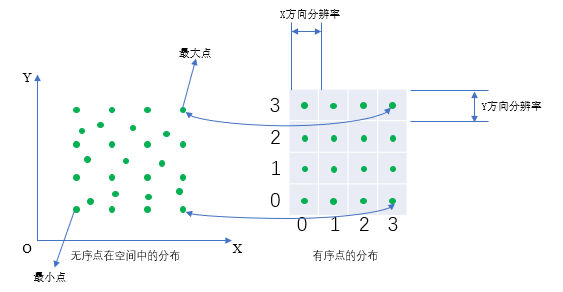
Convert input unorganized point cloud into organized point cloud
Parameter Introduction
Input Parameters

| Parameter | Range | Default Value | Description | Illustration |
|---|---|---|---|---|
| Input Image | 0-8 | 0 | The IM number for image input | |
Calculation Parameters
| Parameter | Range | Default Value | Description | Illustration |
|---|---|---|---|---|
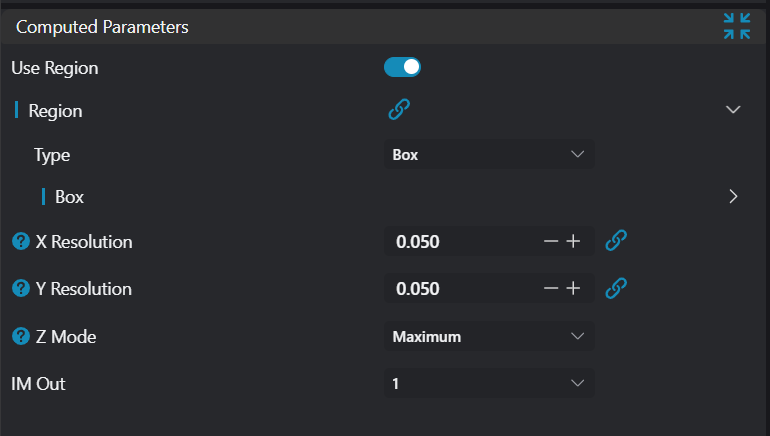
| Use Region Parameters | true/false | false | If enabled, use Region as input; if not enabled, use Input Image as input | |
| Region | 2D Window/Box | Box | Manually select an appropriate ROI regionCan bind to select existing ROI regions | |
| X-axis Resolution | 0.000 | Set the resolution of the converted organized point cloud in the X direction | 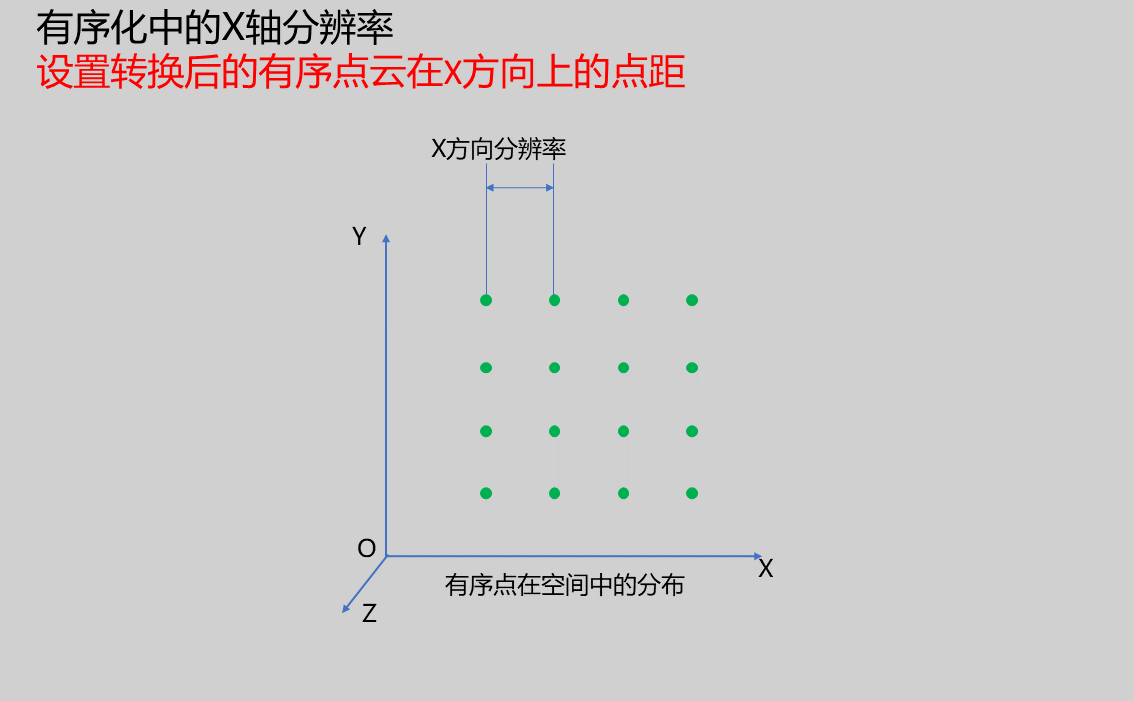 | |
| Y-axis Resolution | 0.000 | Set the resolution of the converted organized point cloud in the Y direction | 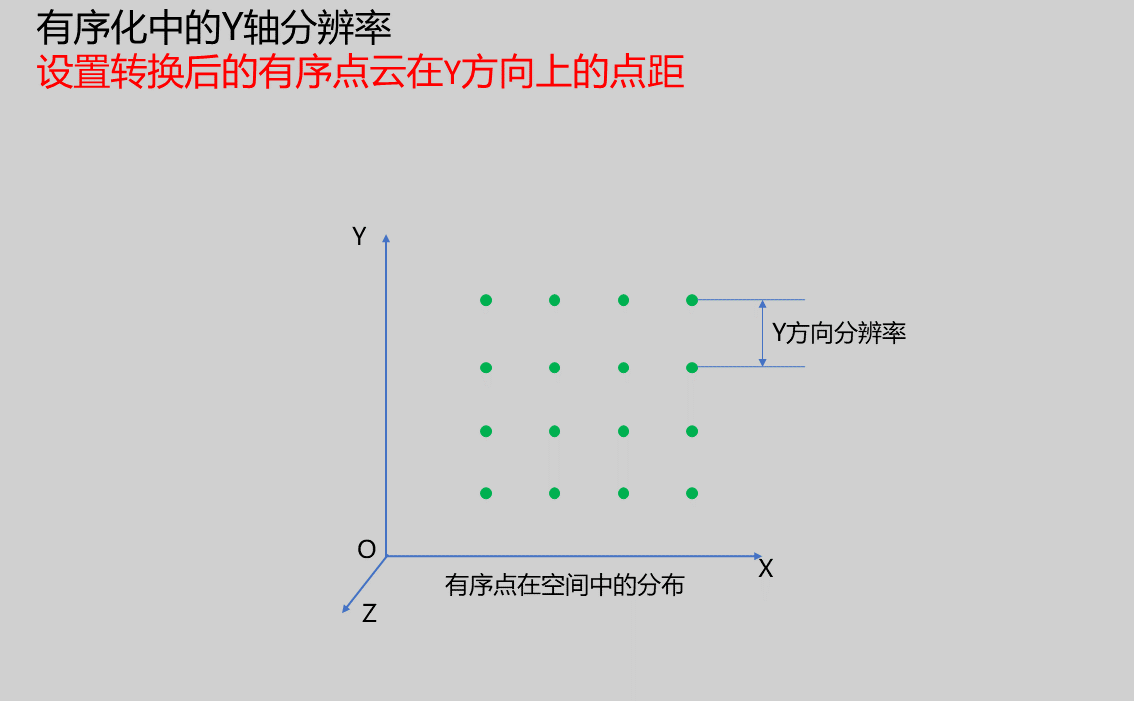 | |
| Height Mode | Minimum/Maximum/Mean/Median | Mean | When resolution is set inappropriately, multiple points may exist in the same grid; set height mode to select how to handle height values Minimum: Use the minimum z value in current grid as the grid height Maximum: Use the maximum z value in current grid as the grid height Mean: Use the mean z value in current grid as the grid height Median: Use the median z value in current grid as the grid height |  |
| Output Image | 0-8 | 0 | The IM number for image output |
Tip
For more detailed explanations of parameter types, please refer to Type Definitions
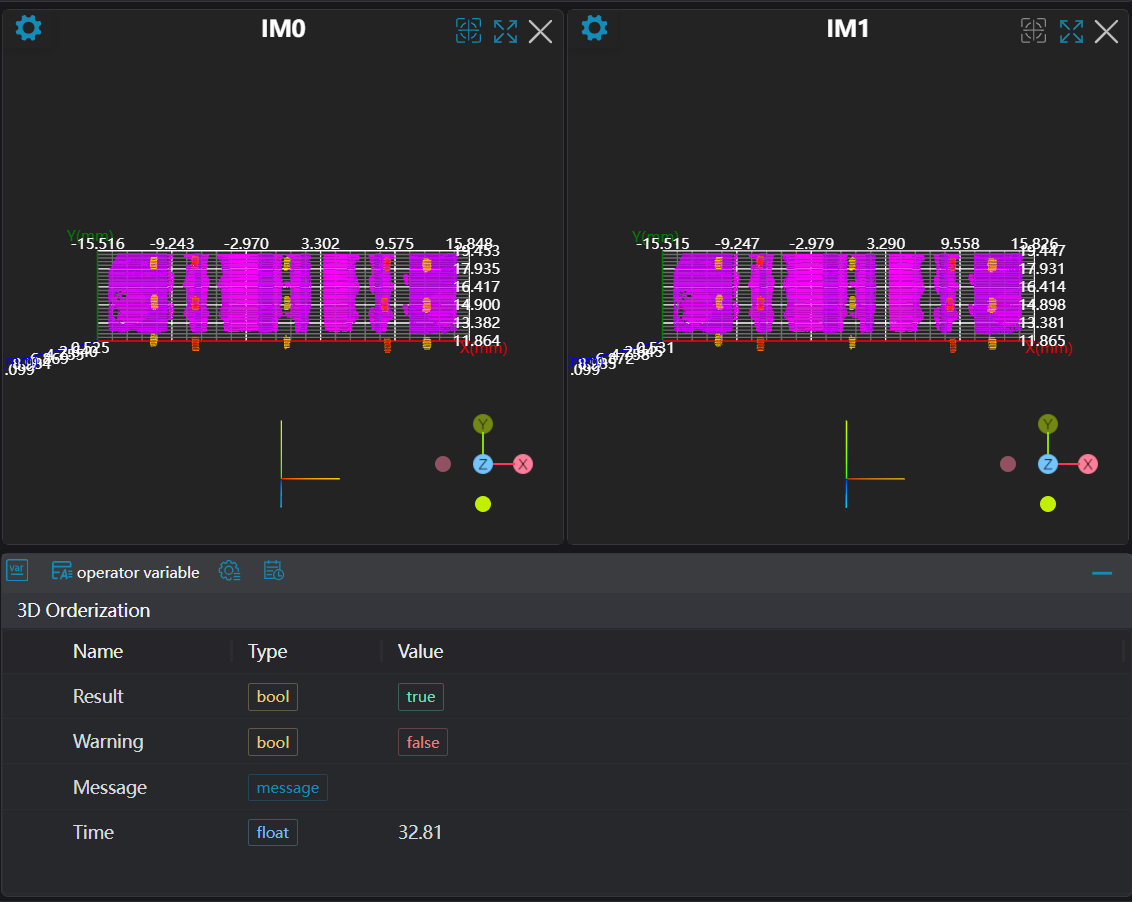
Result Display

| Parameter | Range | Default Value | Description | Illustration |
|---|---|---|---|---|
| ROI Point Set | true/false | false | Only effective when Use Region Parameters is selected; the point set of the ROI selected region; if enabled, displayed in the image |
Output Parameters
| Name | Type | Range | Description |
|---|---|---|---|
| Result | bool | true/false | true for success false for failure |
| Warning | bool | true/false | true indicates there is a warning false indicates there is none |
| Message | string | Outputs success, error, or warning information; if there is no error or warning, it is empty | |
| Time | float | Operator execution time, unit: ms |
Exception Troubleshooting
| No. | Exception Information | Corresponding Parameter | Solution |
|---|---|---|---|
| 1 | Input point cloud is already organized | Input point cloud is already organized, no need for organization processing | |
| 2 | The input value is {0}, invalid region type | Region Type | Only supports window2d, box, pointset |
| 3 | Region is empty | 1. Check if input point cloud is empty 2. Check if ROI region encloses any point cloud 3. Check if bound pointset is empty | |
| 4 | The input value is {0}, {1}, invalid x resolution or y resolution | x resolution, y resolution | x resolution >= point cloud point spacing, y resolution >= point cloud point spacing |
| 5 | The row count * column count of output organized point cloud under current parameters is much larger than input point cloud point count | Increase x resolution and y resolution |
Example Introduction
Engineering Design
Select the
Load 3D Point Cloudtool to load the 3D point cloud image to be processed into IM0.Select the
3D Point Cloud Organizationtool.
Tool Usage
Select the input image for operation; the image number must match the IM number where the image is located in the project.
Select the region type as Box, move the box to the position to be measured, enclosing the point cloud to be measured.
Usage Tips
- Use the ROI controller on the image window to drag or scale the box;
- Directly modify the start or end coordinates of the box in the calculation parameters to adjust the box position and size;
- If you don't want to manually set the region, turn on the
Use Region Parametersbutton, then the input will be the full image.
Set parameters
Click
Testto check if the image window and parameters meet expectationsIf there are no issues, click
Save, then run the operator in the run list to view the results in the corresponding IM