3D Point Cloud Comparison
Operator Function
Select input point cloud and template point cloud, input distance threshold, will output points that do not match the template point cloud beyond the distance threshold
As shown in the figure below: In the left image, red points represent the template point cloud, green points represent the input point cloud. After setting the threshold (threshold greater than d), the output point cloud is shown in the right image

Parameter Introduction
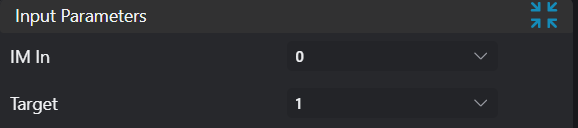
Input Parameters
| Parameter | Range | Default Value | Description | Illustration |
|---|---|---|---|---|
| Input Image | 0-8 | 0 | The IM number for image input | |
| Input Template | 0-8 | 0 | Register number for template source | |
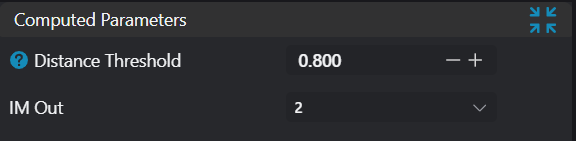
Calculation Parameters
| Parameter | Range | Default Value | Description | Illustration |
|---|---|---|---|---|
| Distance Threshold | 0.200 | Set distance threshold; points within this threshold distance from template points will be removed | 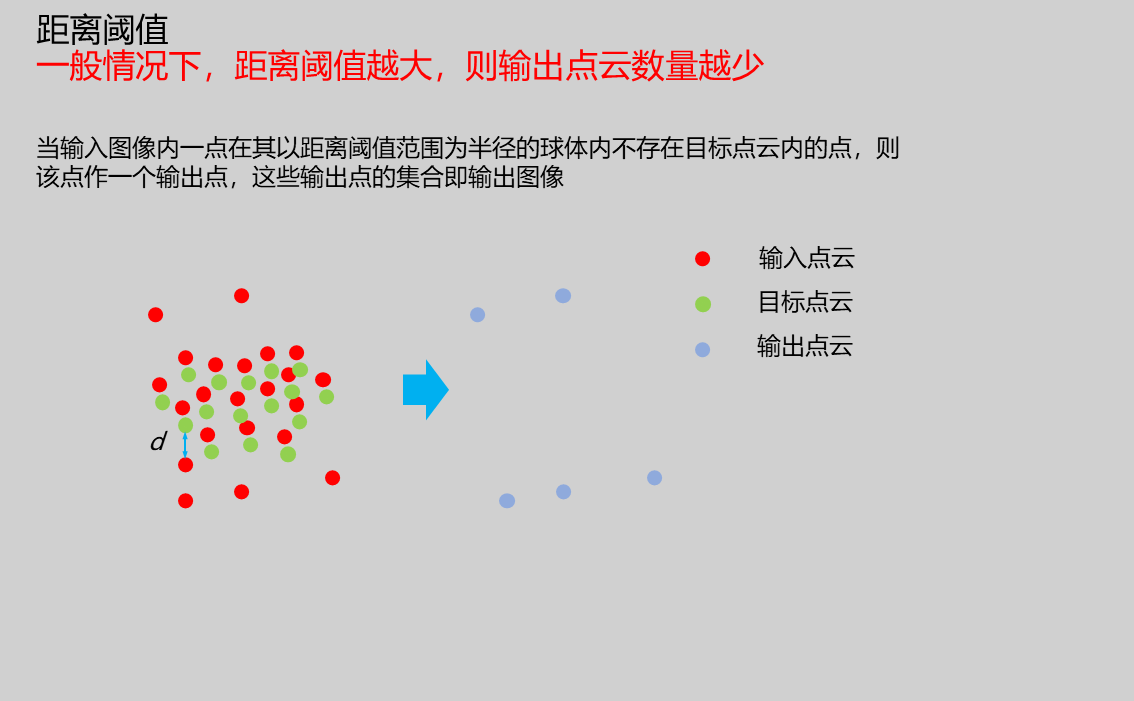 | |
| Output Image | 2 | The IM number for image output |
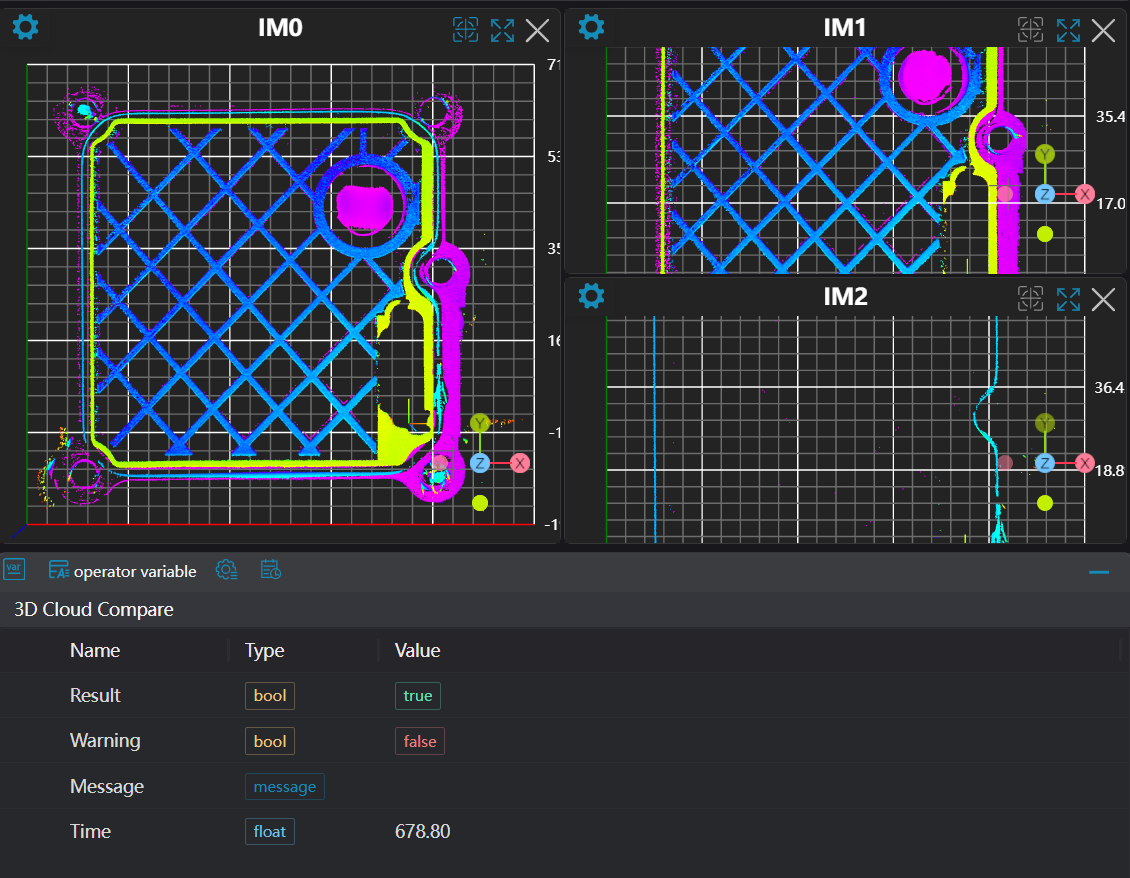
Output Parameters
| Name | Type | Range | Description |
|---|---|---|---|
| Result | bool | true/false | true for success false for failure |
| Warning | bool | true/false | true indicates there is a warning false indicates there is none |
| Message | string | Outputs success, error, or warning information; if there is no error or warning, it is empty | |
| Time | float | Operator execution time, unit: ms |
Tip
For more detailed explanations of parameter types, please refer to Type Definitions
Exception Troubleshooting
| No. | Exception Information | Corresponding Parameter | Solution |
|---|---|---|---|
| 1 | Input point cloud is empty | Confirm if IM contains valid points; if no valid points, load point cloud or switch to IM with valid points | |
| 2 | Output point cloud is empty | 1. Reduce distance threshold 2. If empty when distance threshold is large, check if input and output have similar parts |
Example Introduction
Engineering Design
Select the
Load Point Cloudtool to load the 3D point cloud image to be processed into IM0.Select the
Load Point Cloudtool to load the second 3D point cloud image into IM1.Select the
3D Point Cloud Comparisontool.
Tool Usage
Select the input image for operation and the target point cloud for comparison; the image numbers must match the IM numbers where the images are located in the project.
Set parameters
Click
Testto check if the image window and parameters meet expectationsIf there are no issues, click
Save, then run the operator in the run list to view the results in the corresponding IM